RaspbrryPi Camera が正常に設定され動作するか確認してみましょう。
$ raspistill -v -o test.jpg
動作しない。<後日確認、ケーブルが反対に取り付けていた>
カメラ関連のインストール:Error発生でNG
$ cd ~/catkin_ws/src
$ git clone https://github.com/UbiquityRobotics/raspicam_node.git
$ rosdep update
$ cd ~/catkin_ws
$ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
<エラー:次のパッケージ/スタックの rosdep キー が解決できませんでした。「raspicam_node:[libraspberrypi0]の
rosdep 定義が見つから
ない>
エラーの為、catkin_make が出来ない。
上記再トライ(ROSによりエラーが出る場合の対応を含んだ物)
$ cd ~/catkin_ws/src
$ git clone https://github.com/UbiquityRobotics/raspicam_node.git
ここでROSにより認識されない依存関係が有る為、下記ファイルを修正(追加)する必要があります。
/etc/ros/rosdep/sources.list.d/30-ubiquity.list とマニュアルにはありますが、ファイル名が実際は異なっています。
/etc/ros/rosdep/sources.list.d/20-default.list が正しいファイル名です。
<追加する内容>
yaml https://raw.githubusercontent.com/UbiquityRobotics/rosdep/master/raspberry-pi.yaml
nanoで追加しますが、sudo が必要です。

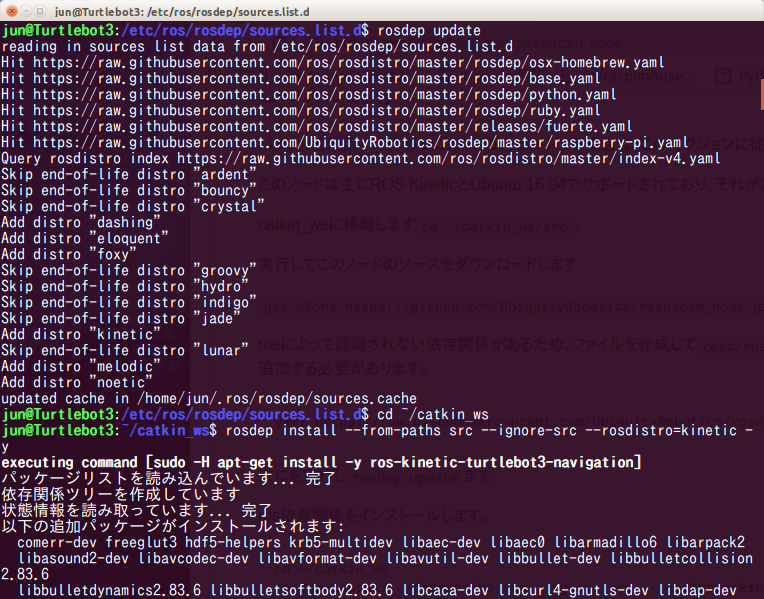
追加した状態(赤枠)

$ rosdep update
$ cd ~/catkin_ws
$ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
これで正常にインストールが出来たので、かなりの時間がかかります。
正常にインストールが出来たので、コードをコンパイルします。
$ catkin_make

コンパイルも正常に終了しました。
[TurtleBot] 次のコマンドは、ROSシステムに関連するRaspberry Pi Cameraパッケージをインストールします
Turtlebot:$ cd ~/catkin_ws/src <操作はリモートPCより実行>
Turtlebot:$ git clone https://github.com/UbiquityRobotics/raspicam_node.git
Turtlebot:$ sudo apt-get install ros-kinetic-compressed-image-transport
ros-kinetic-camera-info-manager
Turtlebot:$ cd ~/catkin_ws && catkin_make
raspicamノードを実行する
ノートPC:$ roscore
Turtlebot:$ ssh jun@192.168.1.100 <操作はリモートPCより実行>
Turtlebot:$ PW <操作はリモートPCより実行>
Turtlebot:$ $ roslaunch turtlebot3_bringup turtlebot3_robot.launch <操作はリモートPCより実行>
Turtlebot:$ roslaunch turtlebot3_bringup turtlebot3_rpicamera.launch
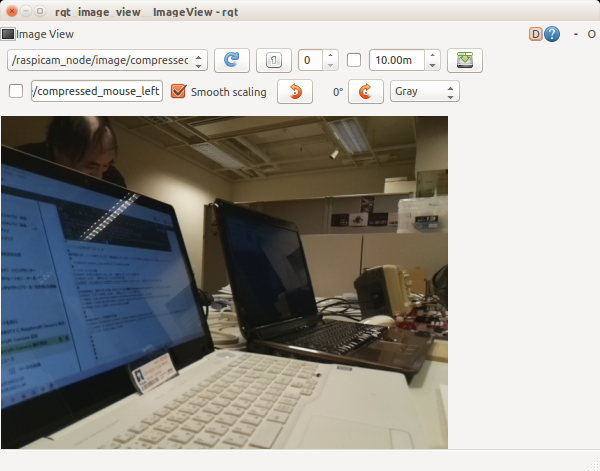
<Turtlebot:$ roslaunch raspicam_node camerav2_1280x960.launch>どちらでもOK:rqt_image_viewで多くの情報が表示される。
リモートPC:$ rqt_image_view
リモートPCにTURTLEBOTに取り付けたRaspbrryPi Camera 画像が表示されました。
RaspbrryPi Camera 関連の設定、動作確認は以上です。
これからは本題にもどりTURTLEBOT3の取組に入ります。