ただ画像を扱うのもメインなので出来るだけ高速処理が必要で、RaspbrryPi3と並行してRaspbrryPi4の取組を行う中で難問山積みです。
1.RaspbrryPi4は、UbuntuにせよRasbianにせよRaspbrryPi3とはOSが異なり手順も異なります。基本サーバーがメインとなります。
2.サーバーなので、SSH、WiFi、日本語化、キーボード選択等の設定が難しく時計の設定も通常の設定では反映しない。
3.ROS・kineticにせよmelodic にせよ roscore の動作までは正常に動作するが、Turtlebot3 のパッケージのインストール後うまく動作しない。
通常UbuntuMATE16.04:ROS・kinetic/Ubuntu18.04:ROS・melodic となっているが、Rasbianの場合どちらもインストールまではOK
【再度、下記URLの内容でトライします。】
1.Raspberry Pi 4 で Turtlebot3 を動かす (Raspbian Buster + ROS Melodic)
https://qiita.com/yura/items/cf63ec23a1438d645707
2.【Buster対応】Raspbianのインストールと最強の初期設定
https://jyn.jp/raspbian-setup/
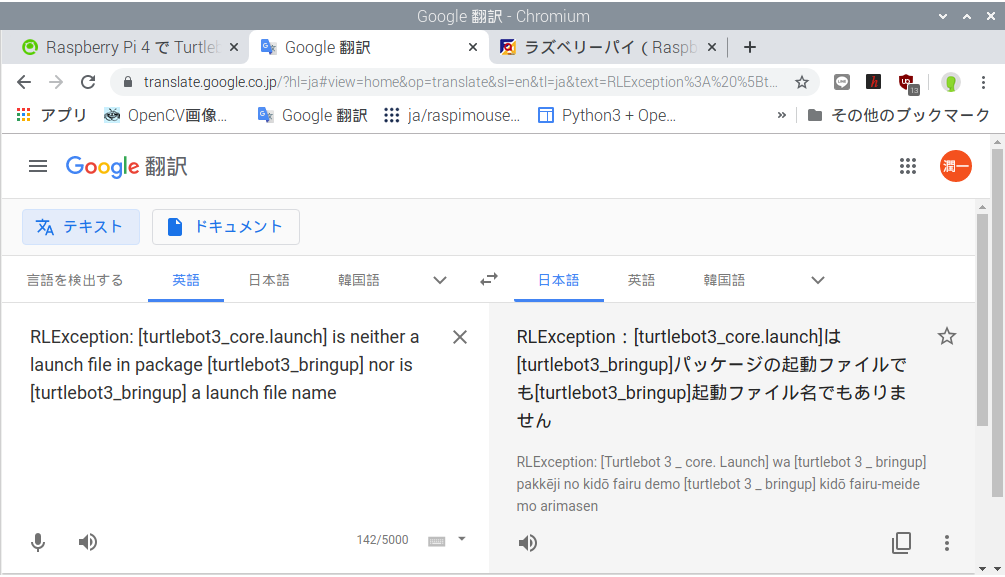
(1)を実行した後の動作確認結果(roscore後に別端末で)

上記エラーを翻訳したもの:指定したコマンドが、起動ファイルではないというエラー
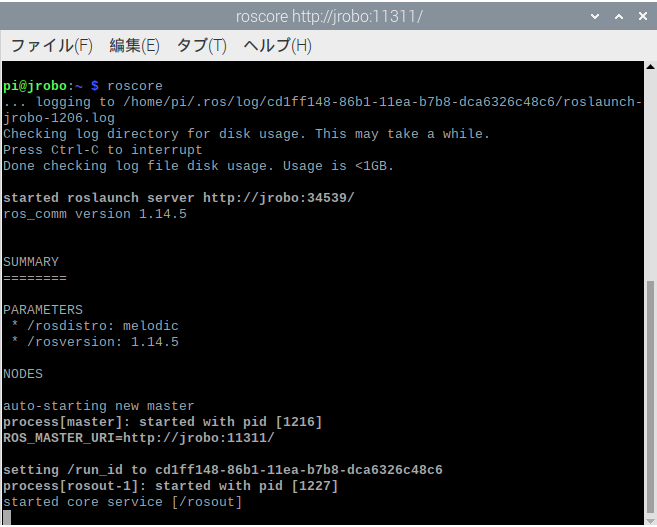
roscore 立ち上げ時の画面で、「melodic」で立ち上がっています。
再度参照URL手順を実行
パッケージのダウンロード、ビルド、インストール:1-186を実行
今回は、186パッケージのビルド中、1個のワーニングも無くスムースに終了した。
その後。roscore/roslaunch turtlebot3_bringup turtlebot3_core.launch
全く同様のエラーが出る。
e-manual の 6.2 Turtlebot3 を再度上書きしてみます。<~/.bashrcが完璧ではないため>
これもうまく動作しないので、
再度全く新規(フォーマット)SDカードを使い
1.Raspberry Pi 4 で Turtlebot3 を動かす (Raspbian Buster + ROS Melodic+Turtlebot3)
https://qiita.com/yura/items/cf63ec23a1438d645707
これを実行しました。
今回は、うまくインストールできたようです。
動作確認
$roscore
別端末で
$roslaunch turtlebot3_bringup turtlebot3_core.launch
この時、OpenCRボードをUSBでRaspberry4に接続していないとエラーとなる。
また別端末で
$roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
この時、機種を設定していないというエラーが出るので「~/.bashrc」に、burger という機種名を書いておく必要があります。
export TURTLEBOT3_MODEL=burger 追記します。
これを追加で記載して、source ~/.bashrc をして reboot すればOKとなります。