Raspberry4ボードとOpenCRボードを使って、「Turtlebot3:2号機」を製作したいと思います。
当初、モーターをTurtlebot3のモーターから、シンプルなDCモーターに交換したかったのですが、ソフトのどの部分を変更すれば良いのか理解が
出来ていないので、そのままTurtlebot3標準のモーターを手配しました。
【 2号機機器構成 】
1.Raspberry4 1枚
2.OpenCR 1枚
3.DYNAMIXEL XL430-W250-T 2式
4.Wheel 2式
5.Tire 2式
6.12VBattery 3A 1式
7.ユニバ―サル・ボード 4枚
8.その他
このROBOTは、HLS_LFCD2(Lider)は使用しません。(後日、Real Senser D435)搭載予定。
【 事前準備 】
Turtlebot3_Robotを準備するにあたり、少し事前準備が必要です。
1.IPアドレスの固定化:192.168.1.110 ( 1号機:192.168.1.100 リモートPC<マスターPC>:192.168.1.200
)
2.~/.bashrc にマスター、ホストアドレス指定、その他設定
3.アクセサリにスクリーンショットアプリをインストール(HP編集用として必要)
$sudo apt-get install gnome-screenshot でインストールすれば自動的にアクセサリのメニューに追加されます。
以上の設定を完了させます。
参考に1号機の Turtlebot3 の ~/.bashrc の内部(一部)です。

先ずは、IPアドレスの固定化ですが、以前ここでPaspberryPi3の設定方法は書きましたが、Raspberry4の設定方法が変わりました。
下記が現状の Raspberry4 のIPアドレスです。(192.168.1.214) これを「192.168.1.110」に変え固定化します。
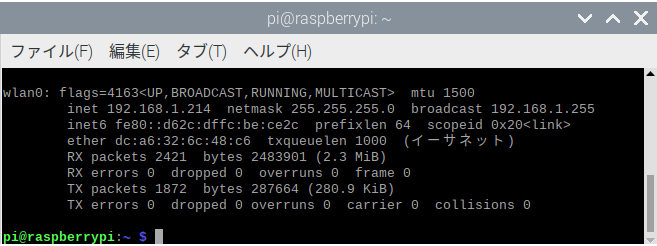
「route -n」でゲートウエイのアドレスを確認しておきます。(IPアドレス固定化に必要)

「sudo nano /etc/dhcpcd.conf」で、dhcpcd.conf に書き換えます。
interface wlan0
static ip_address=192.168.1.110/24
static routers=192.168.1.254
static domain_name_servers=192.168.1.254
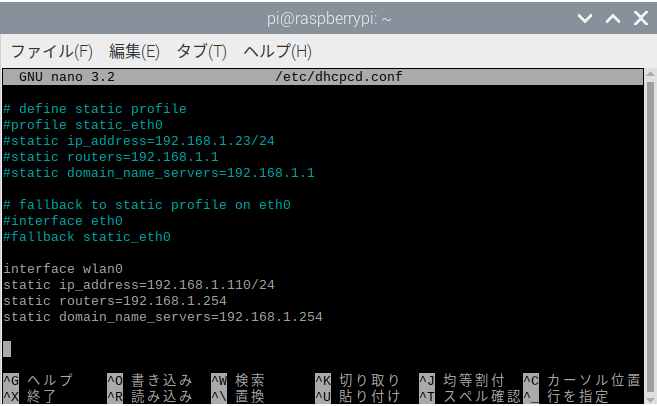
追加後、reboot します。
再立ち上げ後、「ifconfig」でIPアドレスを確認すると「192.168.1.110」になっているはずです。
ゲートウエイのアドレスを間違うと、IPアドレスは上記のアドレスに変わりますがインターネットがつながりませんので注意してください。
今回の場合は、「192.168.1.254」です。
次にマスターとホストのIPアドレスを追加します。
$sudo nano ~/.bashrc
export ROS_MASTER_URI=http://192.168.1.200:11311
export ROS_HOSTNAME=192.168.1.110
export TURTLEBOT3_MODEL=burger
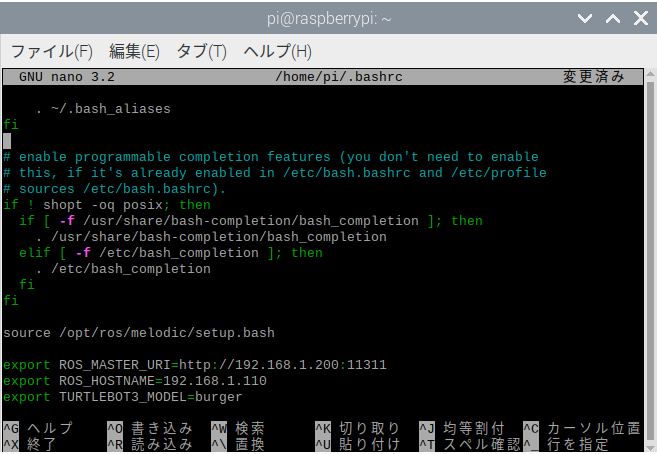
上書き保存し、reboot してください。
これで事前準備は終了です。
【 ロボット製作 】
Robotのベース板を加工します。
タミヤのユニバーサルボード(Lサイズ)を半分にカットして色をオレンジに吹き付けて明るい板にしました。

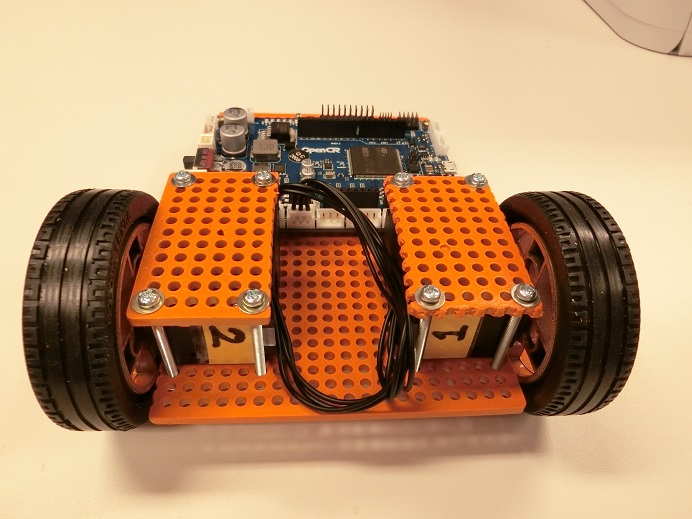
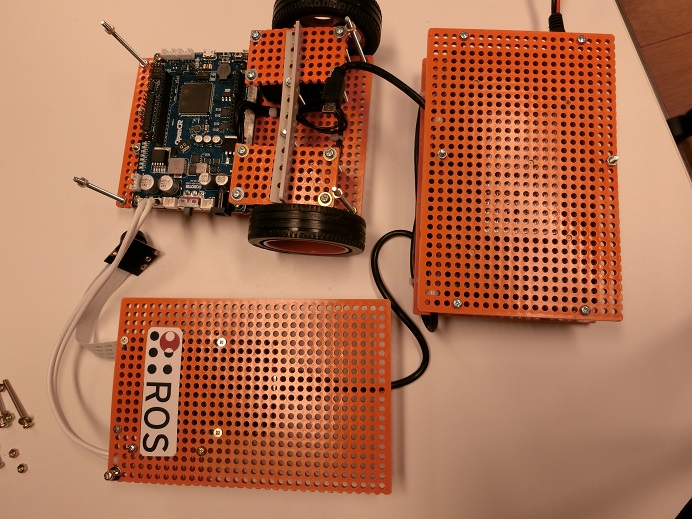
1段目:モーター取付、OpenCRボード取付
2段目:Battery取付
3段目:Raspberry4取付
4段目:予備
<1段目製作>
前面写真
上から写真

2段目はバッテリー部(12V、3A)
3段目はRaspbrryPi4部分です。
下部にある基板は、DC5V電源分配基板です。(OpenCRから5Vを供給:RasPi本体とファンモーターに分配)

電源分配基板拡大写真
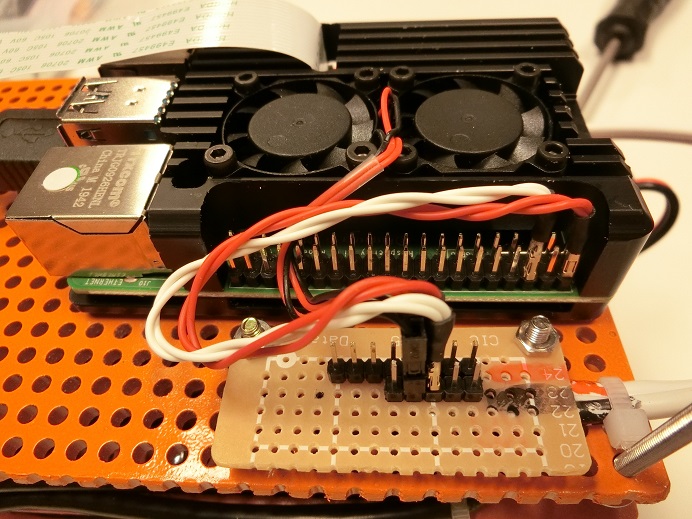
右側の板は1枚に見えますが、12Vバッテリーを挟んでいます。
OpenCRからDC5Vを給電している部分

左が12Vバッテリー電圧供給端子、右側がRaspbrryPi4へ5Vを電源供給している部分

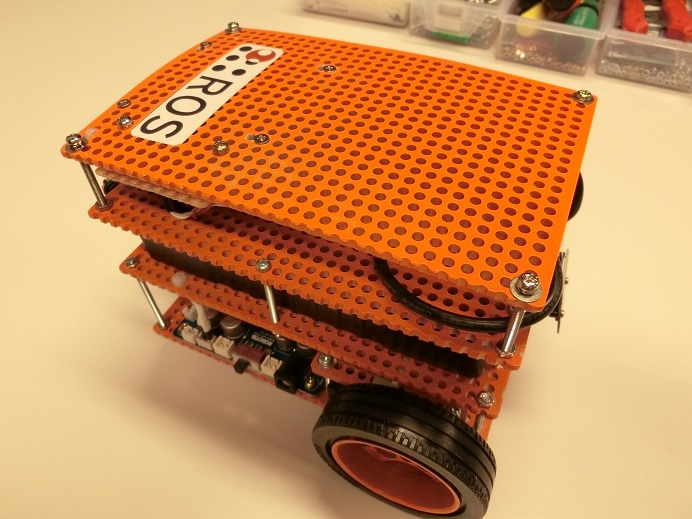
組み上げ完了後ロボット2号機
ロボット2号機前面部、カメラはまだ固定されていない。
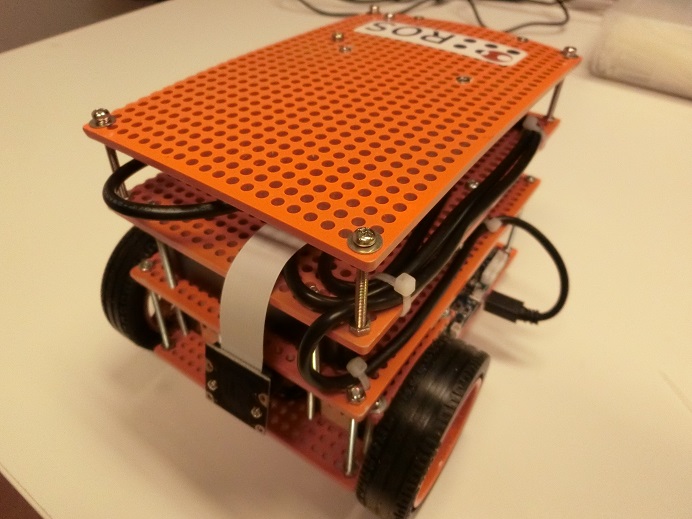
カメラを固定しました。
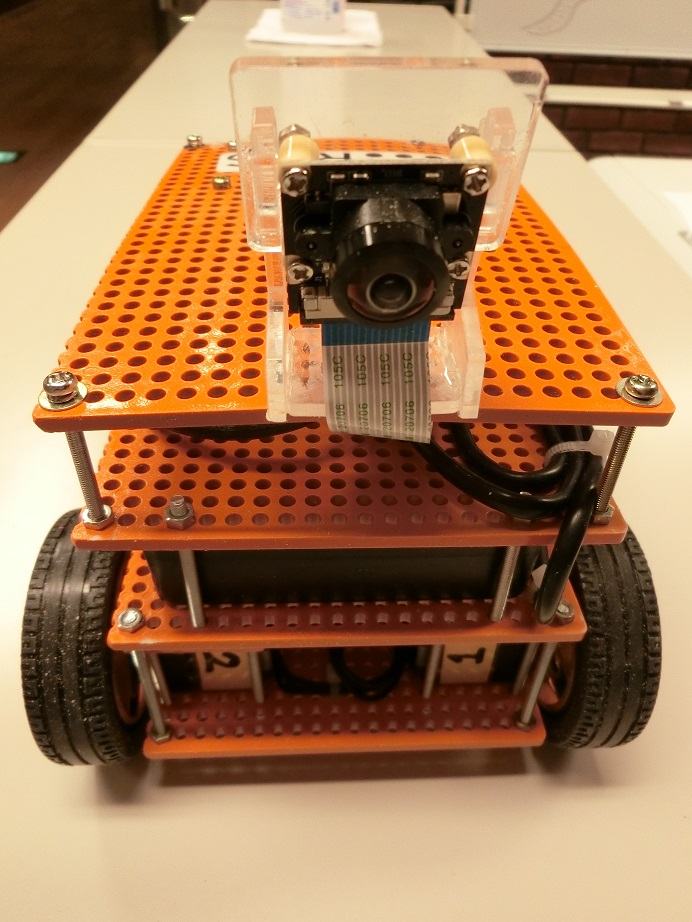
横からみたカメラです。
