今回製作しているようにROSロボットは、1台のリモートPCにより多くのロボットを制御することが出来るが、カメラ校正ファイルの分別方法が
理解できていないので、一度2台目のロボットカメラをキャリブレーションしてどの様になるのか調査してみます。
リモートPC上にある1台目の校正ファイルと2台目の校正ファイルの名前を変えて保存したいと思います。
今気が付きましたが、カメラノードを起動したときワーニングが出ていた事を思い出した。このワーニングこそ校正データがないと指摘されていた。
$rosrun uvc_camera uvc_camera_node (一般的なカメラノード立上げコマンド):ROSバイブル参照・P197)
ワーニングで指摘されているフォルダに校正データを入れて名前を個別化すれば、node & launch 部にフォルダ名、パスを書けば良いようだ。

キャリブレーションに入る前に自動運転パッケージをインストールしておきます。
【 13:自動運転 】
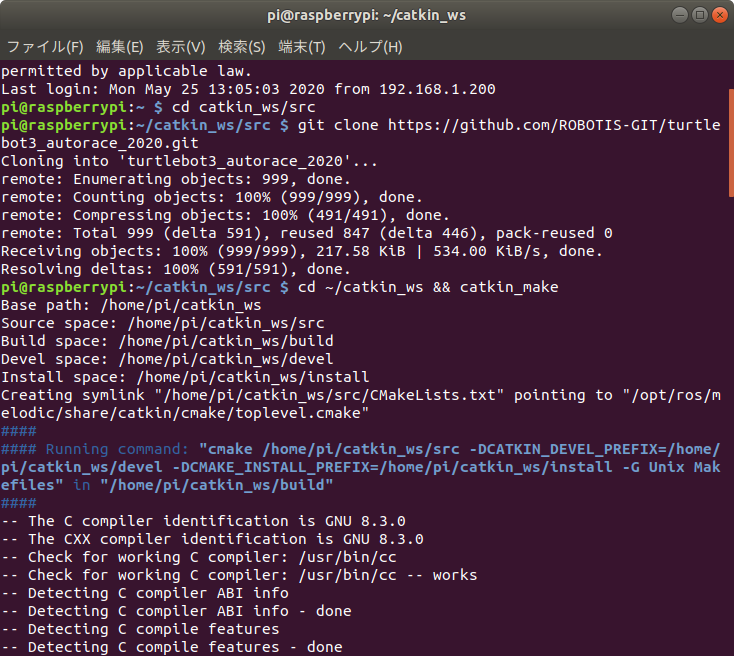
R2:$ cd ~/ros_catkin_ws/src/
R2:$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_autorace_2020.git
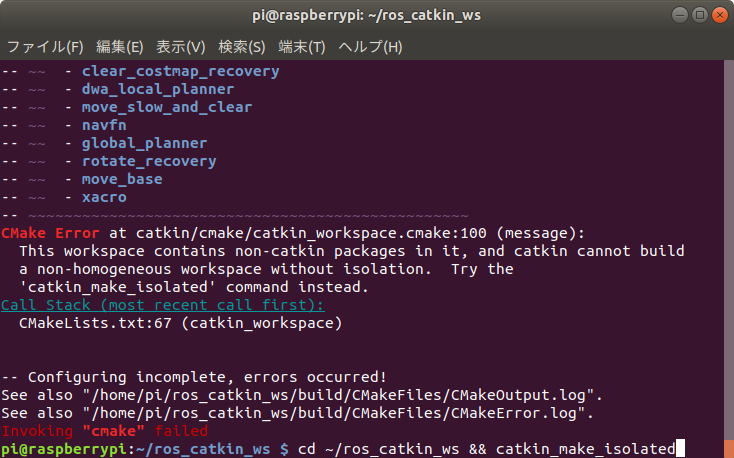
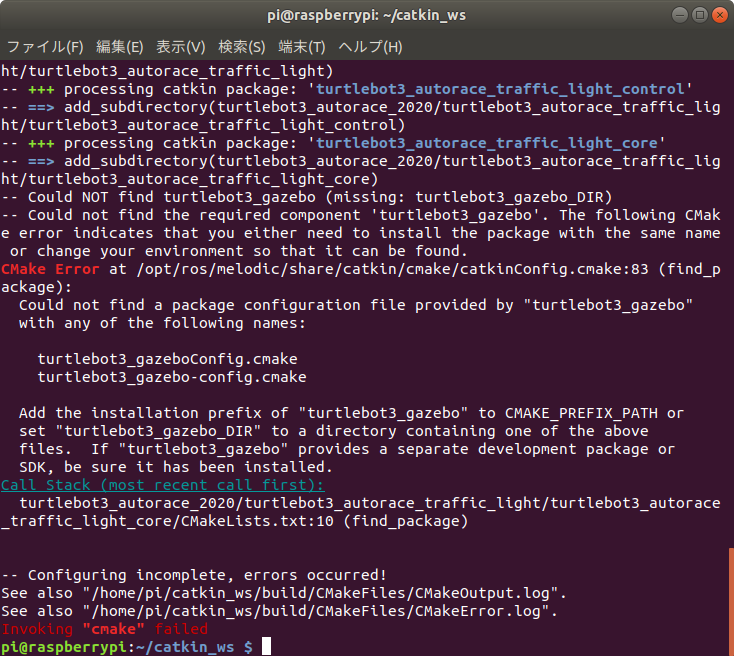
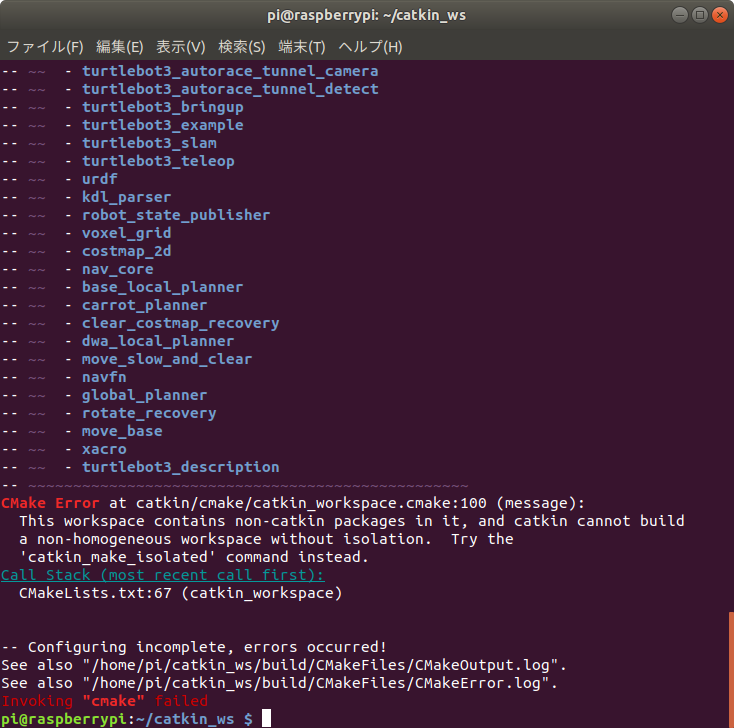
R2:$ cd ~/ros_catkin_ws && catkin_make
ここで以下のCMakeエラー発生( Raspbian/melodicの関係か? ワークエリアがcatkin_ws -> ros_catkin_ws の関係か )

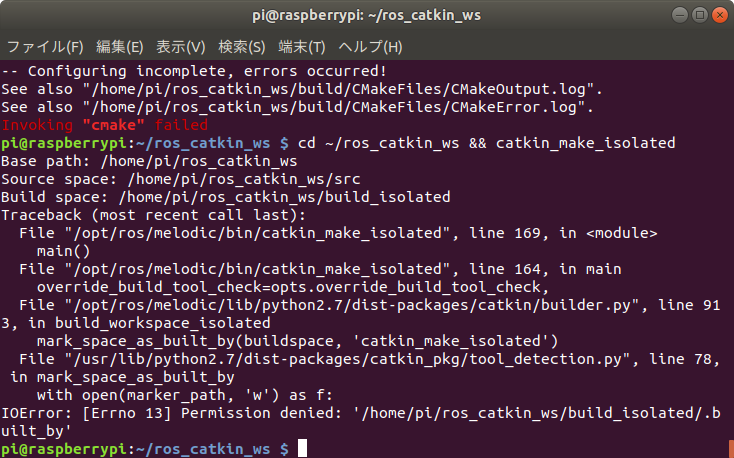
エラーの中に「catkin_make_isolated」を試したらの様なコメントが有ったので試してみた。(下記)
やはりエラー( 内容は全く異なったエラー:意味不明 )
新たに catkin_ws/src を作ってみてここで cmake すればどうか?トライします。ただ今までの ros_catkin_ws で作成してきた物との関係が?
かなり深く進んだが結局CMakeエラーが出る。
やはり今まで「ros_catkin_ws/src」で構築してきているので、ここで突然「catkin_ws/src」の変えてもパッケージが無いというのは正しいので
「ros_catkin_ws/src」内で実行できるように考える必要がある、というかなぜCMakeエラーが出るのか?
対応策としては、
1.CMakeList.txt 内の「catkin_ws/src」部を「ros_catkin_ws/src」に修正する。
2.今まで実行してきた「ros_catkin_ws」をやめて再度「catkin_ws」で構築しなおす。
(1)は、CMakeList.txt 内を覗いてみたが、素人には難しく対応不可。
(2)は、時間がかかり今まで動作確認してきた物を一からのやり直しで、心がおれるが一番シンプルで1号機で実績があり間違いない。
ただOSのVerが違うのと、SBCがRaspbrryPi4の違いがあるのが気がかり。
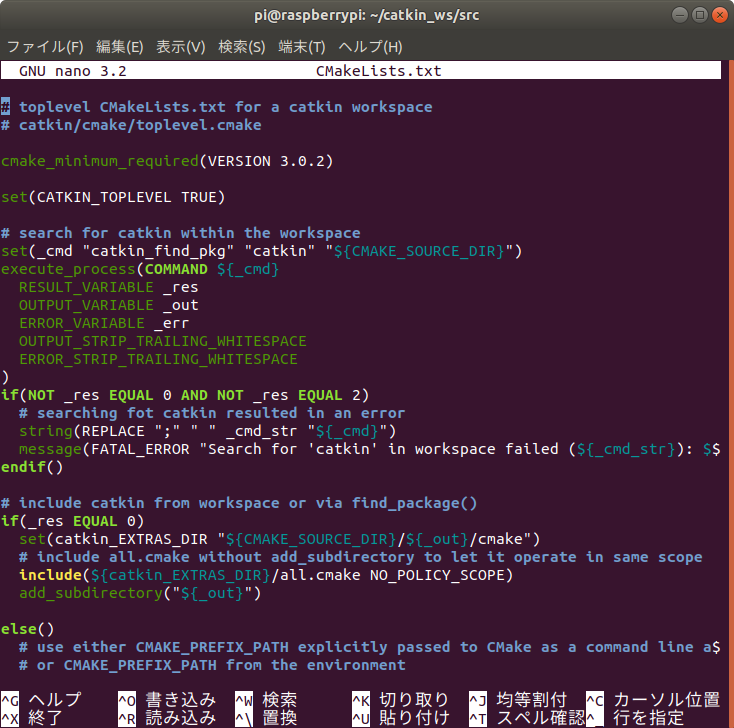
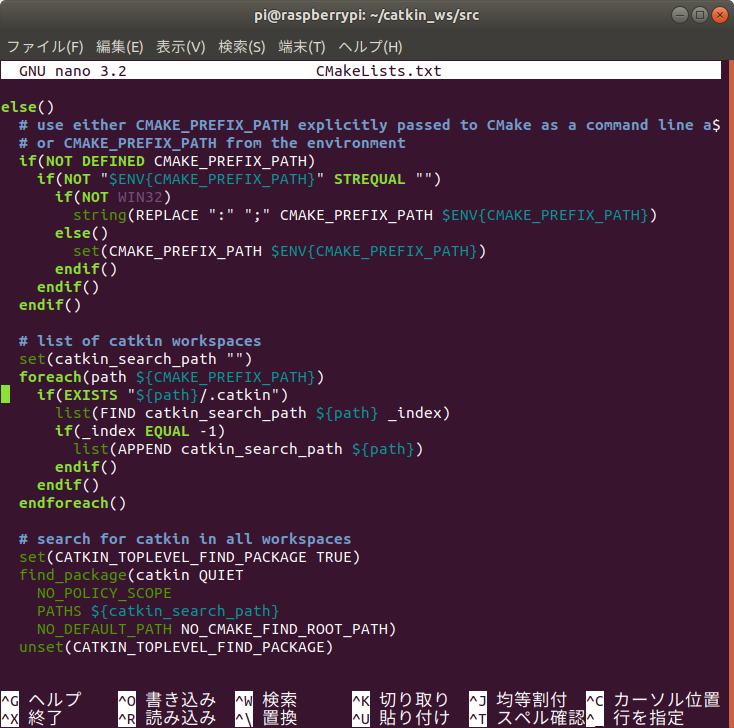
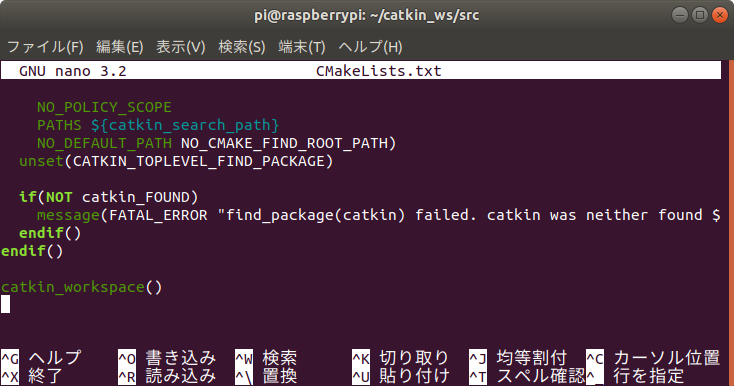
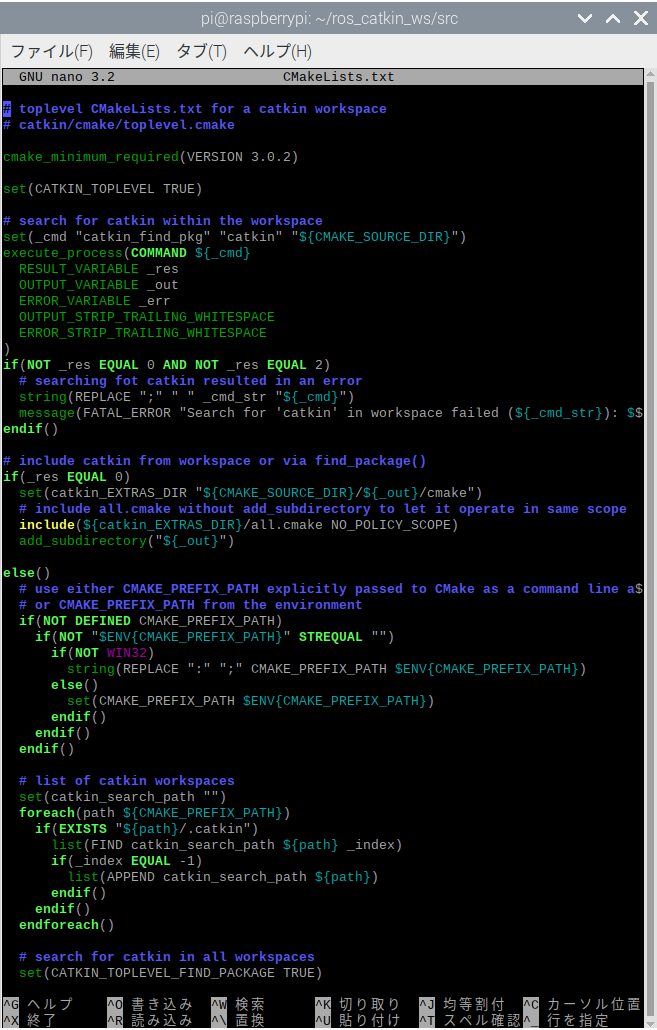
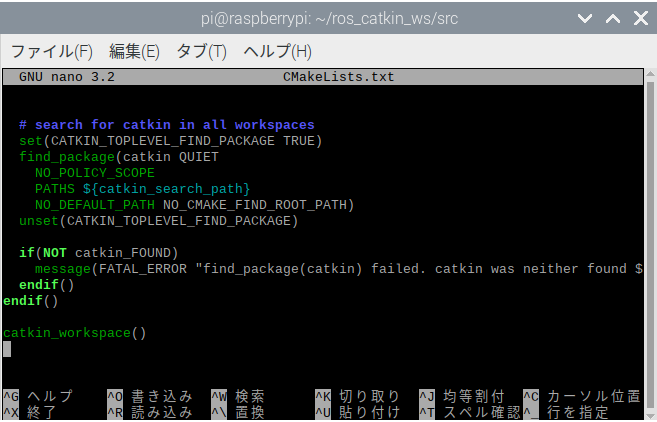
ちなみに「CMakeList.txt」の内容は以下の通りです。(3枚の合成:一部ダブり)
間違っているかも、「ros_catkin_ws/src」内の「CMakelist.txt」の修正が必要かも。
内容を確認した所、上記の「CMakelist.txt」と全く同じなので、エラー発生は当然なのだが修正部分が不明である。
すべての「catkin」部分に「ros_catkin」とするのではないようだし悩みます。
とりあえず自分の能力の範囲で可能な作業場所名「catkin_ws/src」での構築を行い状況を見極めたいと思います。
次ページへジャンプ
【 エラー関係資料 】
1.CMake の Version
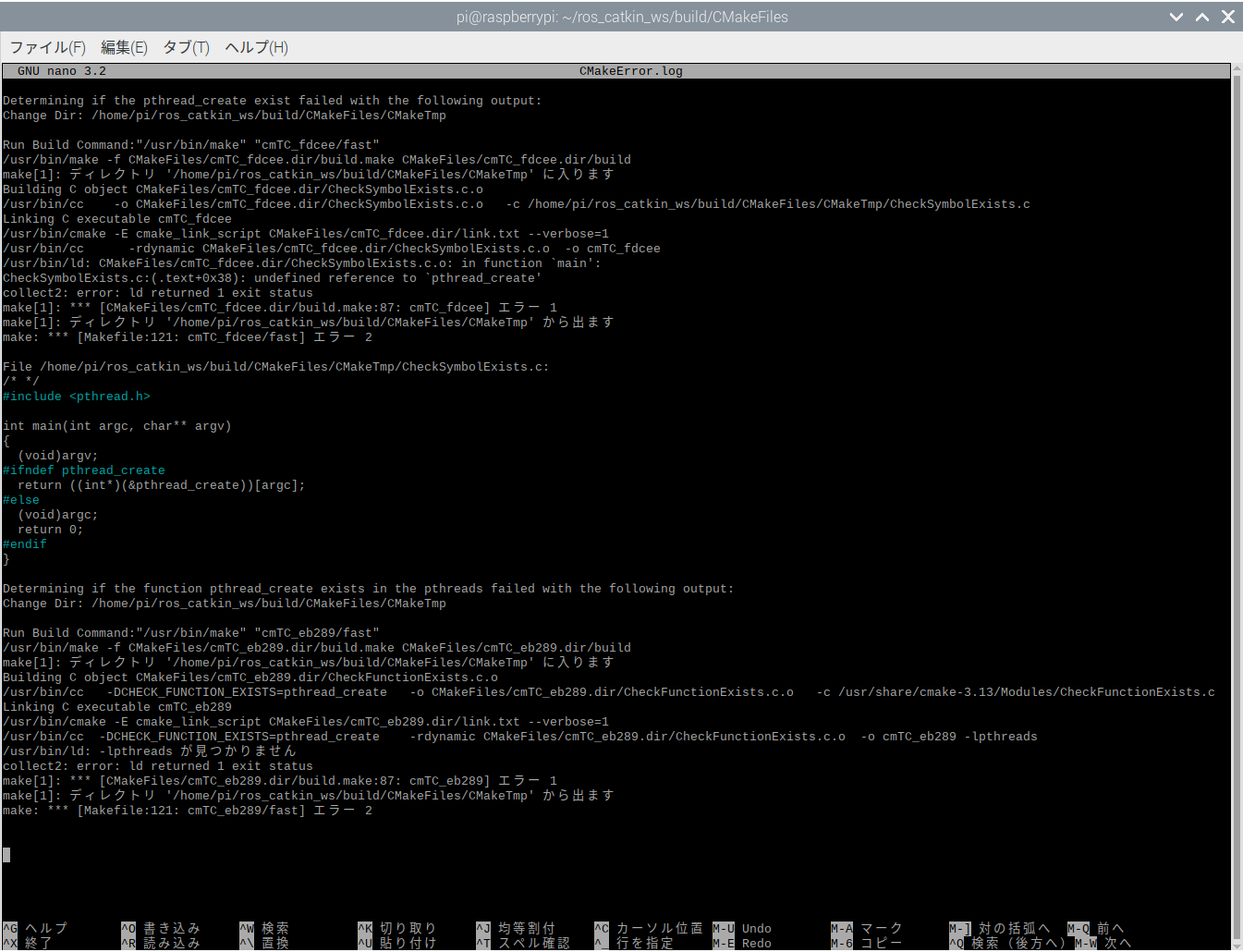
2.~/ros_catkin_ws/build/CMakeFiles/CMakeError.log
拡大できます。
3.~/ros_catkin_ws/src/CMakeLists.txt
拡大できます。
4.src フォルダ内には、clone 以外には入れていないはずです。以下がフォルダ内です。

エラーログを見てみると、pthreadsのライブラリが見つかっていないようです。
$ sudo apt-get install libboost-all-dev
このライブラリは上記コマンドでインストールできると思うので試してみてください。

すでにインストールされているようだ。
再度CmakeしてみるとCMake途中で気になる部分を発見。
エラー結果は同じです。
CMake途中の赤文字がエラーなのかどうかも不明です。