前回成功している下記サイトを参照しながら、SDカードは新しく「Raspbian・Buster」インストール終了後のイメージを使用します。
https://qiita.com/yura/items/cf63ec23a1438d645707
RaspbrryPi4・GUI画面より < WiFiキーボード、マウス、HDMIにてディスプレー接続 >
1.WiFi チェック:事務所 WiFi に接続終了されている。(SD初期状態で)
2.$sudo raspi-config
(1)PW変更(ja3dxa8823)
(5)camera, ssh, spi, i2c, Serial, RemoteGPIO 等使用可能にする。
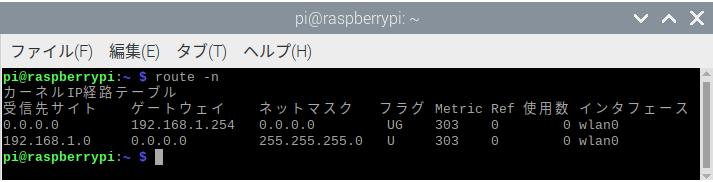
3.IPアドレス固定 <現状アドレスの確認>
ゲートウエイ・アドレスの確認:「route -n」 pi@192.168.1.254
(追加)Rasbian/Buster スクリーンショット機能追加
$sudo apt-get install gnome-screenshot で、アプリケーションホルダに自動的に入る。
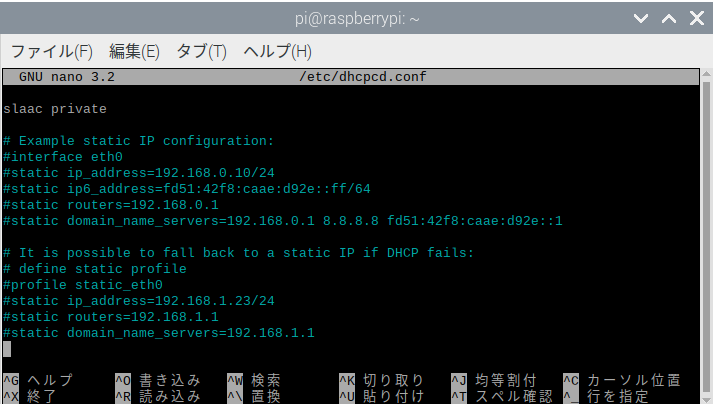
$sudo nano /etc/dhcpcd.conf ここで dhcpcd.conf を書き換える。
【リモートPCより ロボット2号機へ ROS・melodic & Turtlebot3 を インストール】
$sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
$sudo apt-get update
$sudo apt install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential cmake
多くのパッケージをインストールしました。
$sudo rosdep init
$rosdep update
ここまでOKです。
$mkdir ~/catkin_ws
$cd ~/catkin_ws
$rosinstall_generator ros_comm navigation turtlebot3 turtlebot3_msgs --rosdistro melodic --deps --wet-only --tar >
melodic-turtlebot3-wet.rosinstall
$wstool init -j4 src melodic-turtlebot3-wet.rosinstall
ここまでもOK
$rosdep install -y --from-paths src --ignore-src --rosdistro melodic -r --os=debian:buster
$sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/melodic -j2
エラー内容は、モデル名が指定されていないというエラーです。
HPには書かれていませんが、「~/.bashrc」にモデル名を書いておく必要があります。
export TURTLEBOT3_MODEL=burger
再度、roscore からコマンドを打っていくと Turtlebot3 2号機が前後左右に動きました。
https://qiita.com/yura/items/cf63ec23a1438d645707
RaspbrryPi4・GUI画面より < WiFiキーボード、マウス、HDMIにてディスプレー接続 >
1.WiFi チェック:事務所 WiFi に接続終了されている。(SD初期状態で)
2.$sudo raspi-config
(1)PW変更(ja3dxa8823)
(5)camera, ssh, spi, i2c, Serial, RemoteGPIO 等使用可能にする。
3.IPアドレス固定 <現状アドレスの確認>
ゲートウエイ・アドレスの確認:「route -n」 pi@192.168.1.254
(追加)Rasbian/Buster スクリーンショット機能追加
$sudo apt-get install gnome-screenshot で、アプリケーションホルダに自動的に入る。
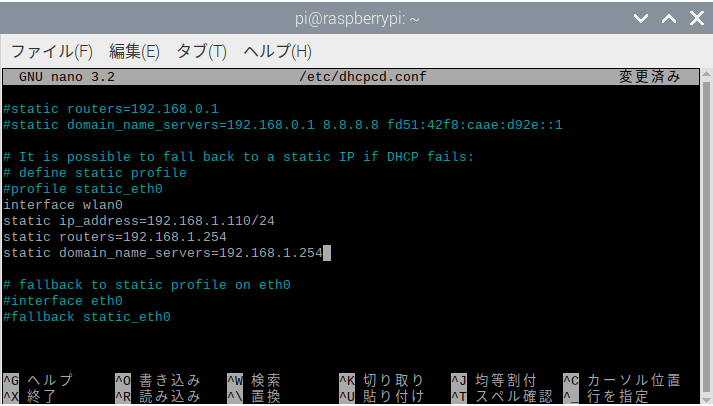
$sudo nano /etc/dhcpcd.conf ここで dhcpcd.conf を書き換える。
interface wlan0
static ip_address=192.168.1.110/24
static routers=192.168.1.254
static domain_name_servers=192.168.1.254
修正前
修正後
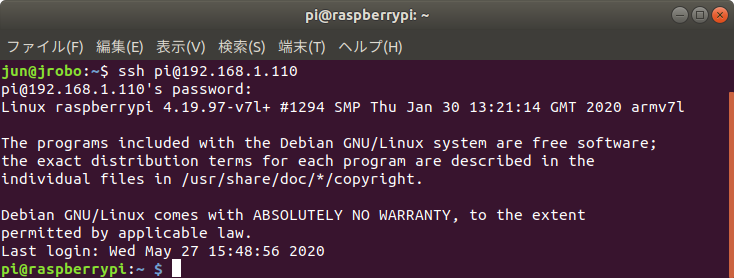
リブート後、リモートPCよりTurtlebot3/2号機に入り込み成功(IP固定されている)
【リモートPCより ロボット2号機へ ROS・melodic & Turtlebot3 を インストール】
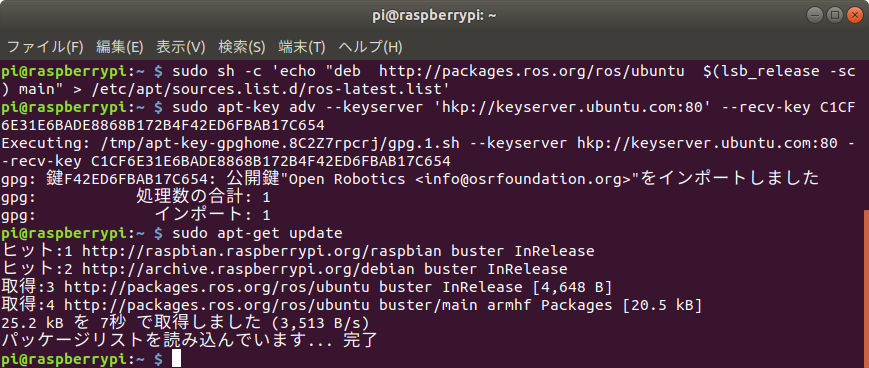
$sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
$sudo apt-get update
$sudo apt install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential cmake
多くのパッケージをインストールしました。
$sudo rosdep init
$rosdep update
ここまでOKです。
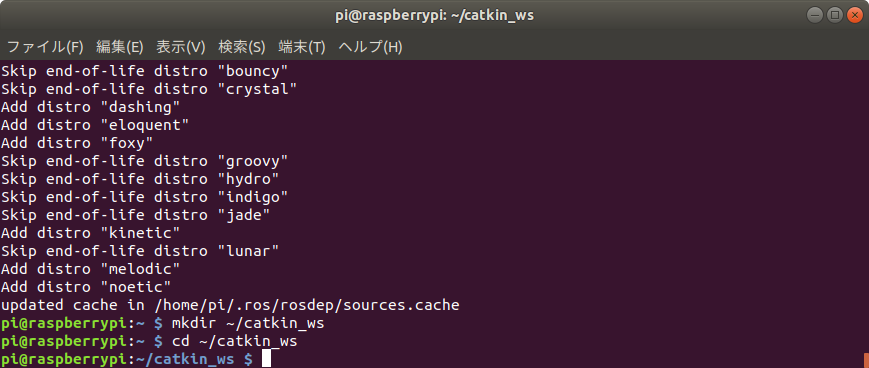
$mkdir ~/catkin_ws
$cd ~/catkin_ws
$rosinstall_generator ros_comm navigation turtlebot3 turtlebot3_msgs --rosdistro melodic --deps --wet-only --tar >
melodic-turtlebot3-wet.rosinstall
$wstool init -j4 src melodic-turtlebot3-wet.rosinstall
ここまでもOK
$rosdep install -y --from-paths src --ignore-src --rosdistro melodic -r --os=debian:buster
$sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/melodic -j2
これは、2時間程度かかるので、明日の作業とします。
今回は、113のパッケージの CMake となりました。RaspbrryPi4でのコンパイル(ビルト)速度を計ってみました。
コンパイル(ビルド)時間は、ちょうど1時間でした。約2倍のスピードでした。
$echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$source ~/.bashrc
終了です。
動作確認
$roscore
$roslaunch turtlebot3_bringup turtlebot3_core.launch
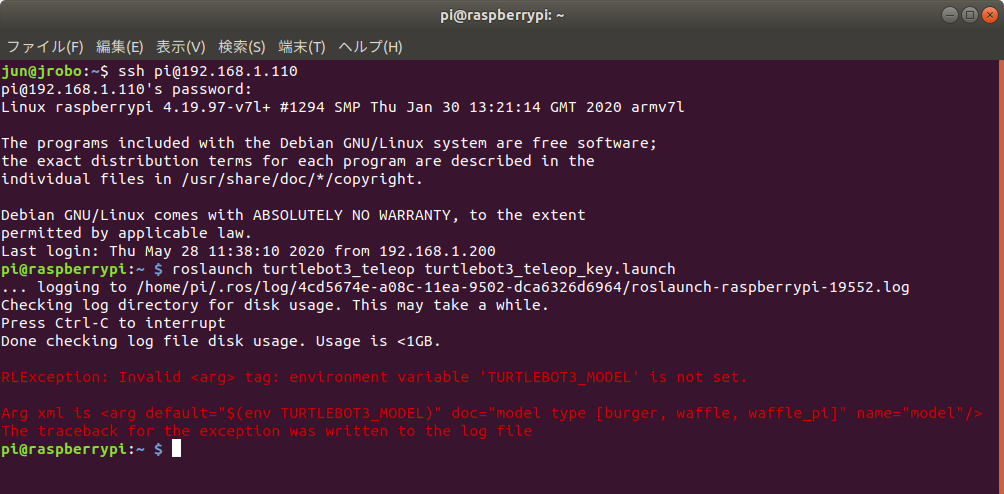
$roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
ここでエラーが出ました。
エラー内容は、モデル名が指定されていないというエラーです。
HPには書かれていませんが、「~/.bashrc」にモデル名を書いておく必要があります。
export TURTLEBOT3_MODEL=burger
再度、roscore からコマンドを打っていくと Turtlebot3 2号機が前後左右に動きました。
これからは、ROS・e-Manual に沿って個別パッケージのインストールと動作確認を行っていきます。
次ページへジャンプ