参考URLは、Turtlebot3 の e-Manual です。<付録:RaspberryPiカメラ>
https://github.com/UbiquityRobotics/raspicam_node
上記の説明にあるRaspberryPiのカメラインターフェイスは有効に設定されているものとします。
機能テストは、下記のコマンドを実行します。
$ raspistill -v -o test.jpg ディスプレーには5秒間画像が表示され、その後Homeに「test.jpg」が保存されます。
正常に動作すれば、次にカメラ関連のROSパッケージをインストールします。
$ cd ~/catkin_ws/src
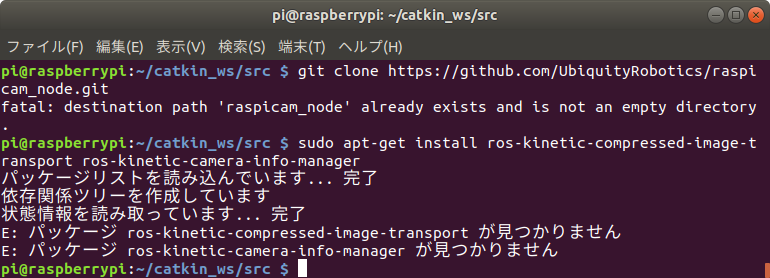
$ git clone https://github.com/UbiquityRobotics/raspicam_node.git
$ sudo apt-get install ros-kinetic-compressed-image-transport ros-kinetic-camera-info-manager
$ cd ~/catkin_ws && catkin_make
上記の3番目のコマンドでファイルが見つからない。
間違っていました。kinetic -> melodic 再度実行したが同様であった。
別のサイトも参考にトライ
http://ogimotokin.hatenablog.com/entry/2018/01/14/100125

https://qiita.com/kon_yu/items/8ac350f3951f8534c931
上記を参考に、「apy-get」で見つからないパッケージをインストール方法を試す。
dpkg フロントエンドロック(/ver/lib/dpkg/lock-frontend)を取得できません。ルートですか? というエラーメッセージ
repositoryを追加する。
まず現状のリポジトリのリストを確認する。non-freeがないことを確認 -> ある。
#下の行のコメントを外して、「apt-get update」や「apt-get source」を有効にします。
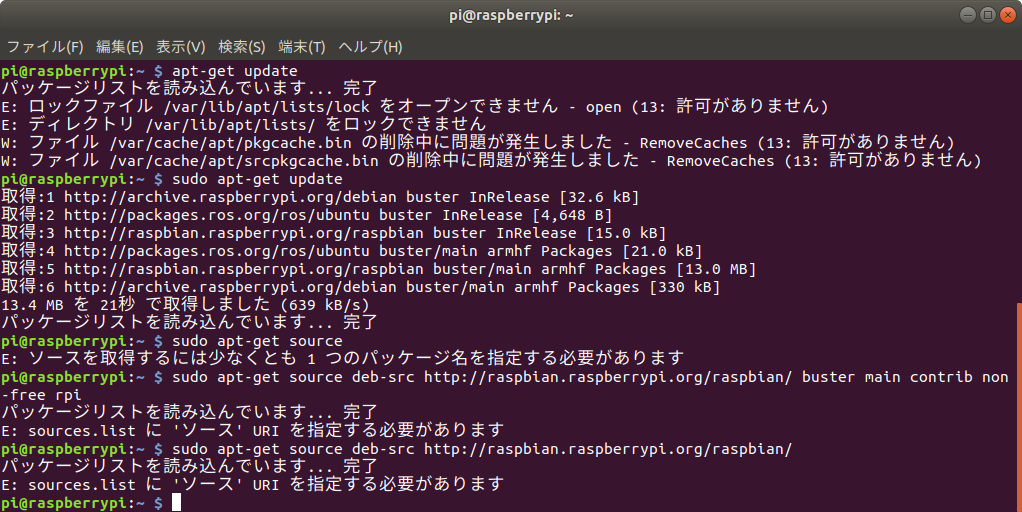
「apt-get update」は、sudo が必要。
「apt-get source」は、パッケージ名が必要という事で上記の様に指定したが間違っているようだ。
リポジトリの追加用のapt-add-repositoryパッケージをインストールする
$apt-get install apt-file
$sudo apt-get install apt-file と管理者権限が必要。

$sudo apt-get install apt-file
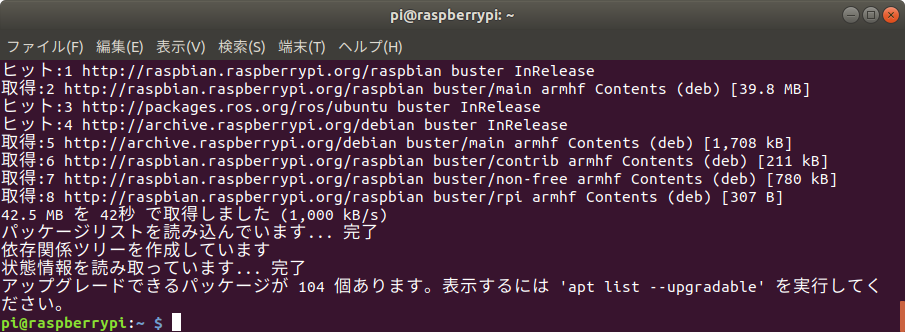
上記画面の様に104個のアップグレードできるパッケージがある様なので下記コマンドでアップグレードする。
$sudo apt-get upgrade
$sudo apt-file update
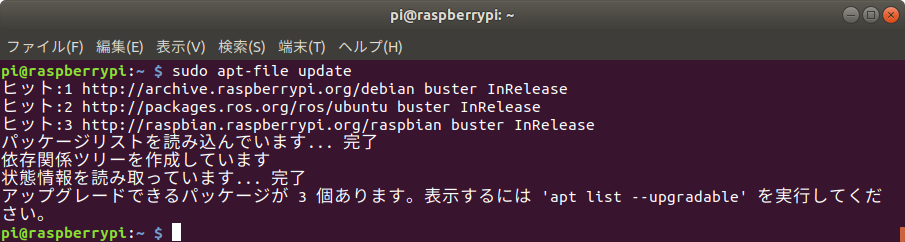
$sudo apt-file search apt-add-repository

$sudo apt-get install -y software-properties-common
先程調べたiozone3パッケージのあるnon-freeリポジトリをリポジトリのリストに追加してあげる
$sudo apt-add-repository non-free
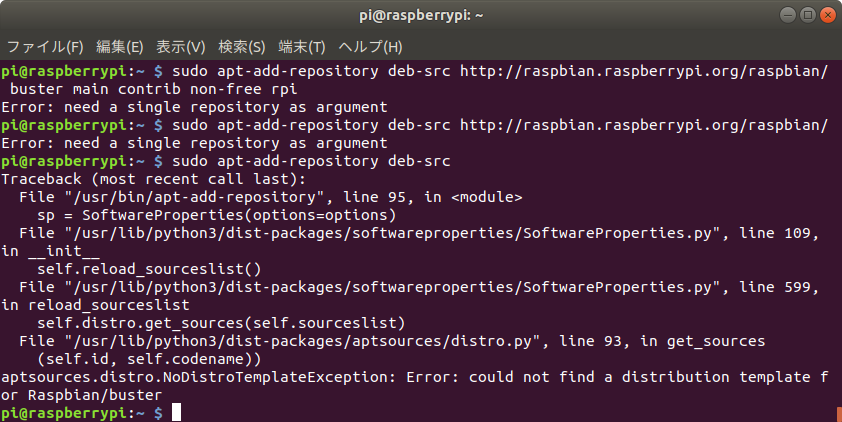
non-free 部分には、以前エラーを起こした内容を記載したが、2回エラーとなった。
結果、「deb-src」のみを記載して一応実行されたが正しいのかどうかは不明である。
リポジトリリストの確認
$cat /etc/apt/sources.list

再度カメラ関係のパッケージインストール
$ cd ~/catkin_ws/src
$ git clone https://github.com/UbiquityRobotics/raspicam_node.git
$ sudo apt-get install ros-kinetic-compressed-image-transport ros-kinetic-camera-info-manager
$ cd ~/catkin_ws && catkin_make
結果、apt-get でのインストールはNGのままです。
下記にもチャレンジ
https://github.com/UbiquityRobotics/raspicam_node

いきなりパッケージが見つからないです。
なにか apt install 出来ない原因があるようです。(例えばバイナリ&ソースの違い)
ソースからのビルドで試してみます。
catkin_wsに移動します。 $cd ~/catkin_ws/src
次のコマンドを実行して、このノードのソースをダウンロードします
$git clone https://github.com/UbiquityRobotics/raspicam_node.git
これは以前実行済みなので、すでにファイルがあるというメッセージが出る。
rosで認識されない依存関係がいくつかあるため、ファイルを作成して/etc/ros/rosdep/sources.list.d/30-ubiquity.listこれに追加する必要があります。
私の環境では、以下の通り「20-default.list」となっています。
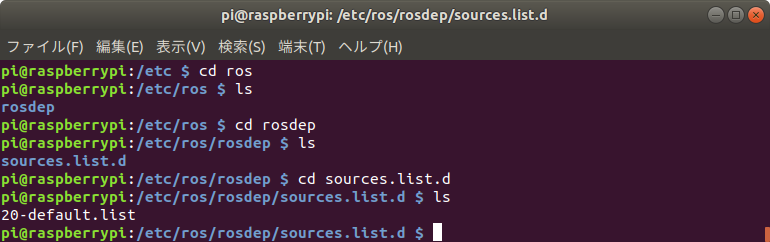
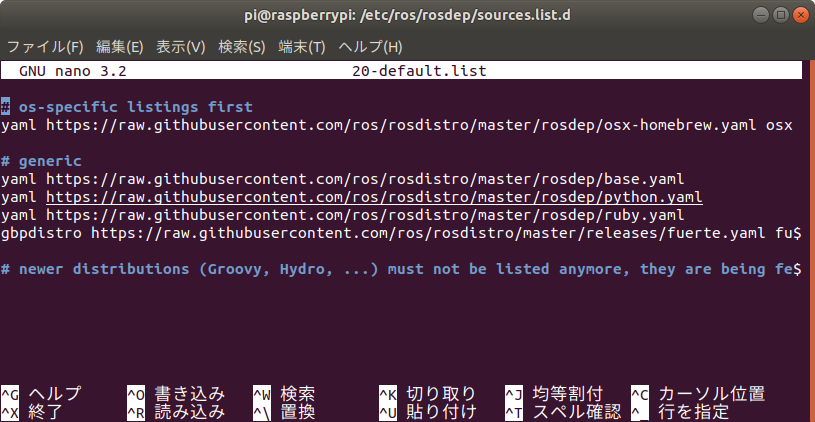
$sudo nano 20-default.list
この中に、以下の内容を追加します。
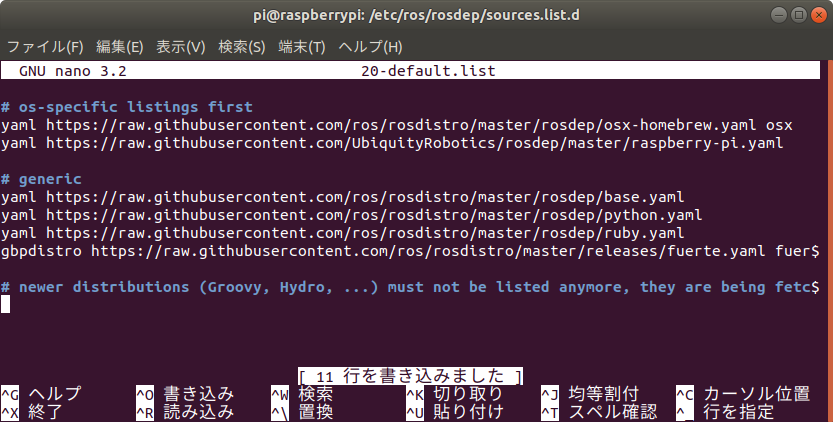
yaml https://raw.githubusercontent.com/UbiquityRobotics/rosdep/master/raspberry-pi.yaml
追加した後のリスト内部
次に「rosdep update」を実行します。
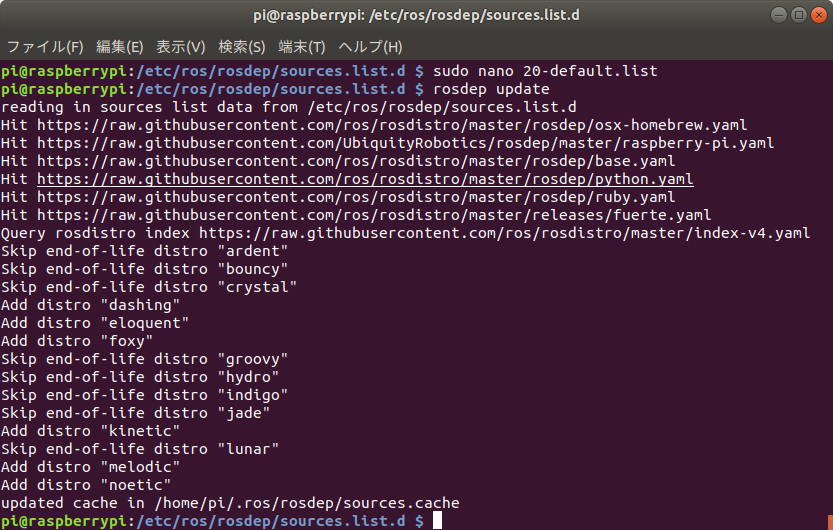
ros依存関係をインストールします。
$cd ~/catkin_ws
$rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y ここの kinetic を melodic に変更
エラーが出た。

次のパッケージ/スタックは、rosdepキーを解決できなかった。システム依存関係へ
下記参照
https://github.com/tork-a/jog_control/issues/12
$ cd ~/catkin_ws
$ rosdep install -r --from-path src --ignore-src
上記画面と同様のエラーメッセージが出たが、1万個以上のパッケージがインストールされた。
しかし、catkin_make したら今までと同様のCMakeエラーが出る。(改善されない)
これも試してみました。
https://asukiaaa.blogspot.com/2018/06/raspberry-pi-raspbianstretchrosmelodic.html
$sudo apt update
$sudo apt upgrade -y
$sudo apt install dirmngr -y
$sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
$sudo apt update
ソースコードの配置やビルドに必要な関連プログラムをインストールします。
$sudo apt install -y python-rosdep python-rosinstall-generator python-wstool python-rosinstall python-empy build-essential cmake
rosdepの初期化とROSのワークスペースとして使うディレクトリを作成します。
$sudo rosdep init
$rosdep update
$mkdir ~/catkin_ws 存在するので不要
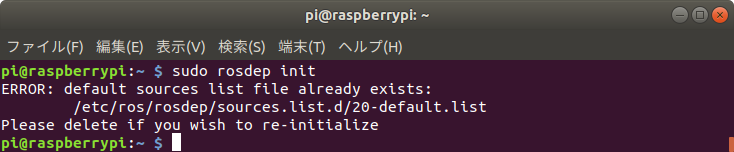
デフォルトのソースリストファイルは既に存在するので、再初期化する場合は削除してください、というエラー。
/etc/ros/rosdep/sources.list.d/20-default.list を削除します。
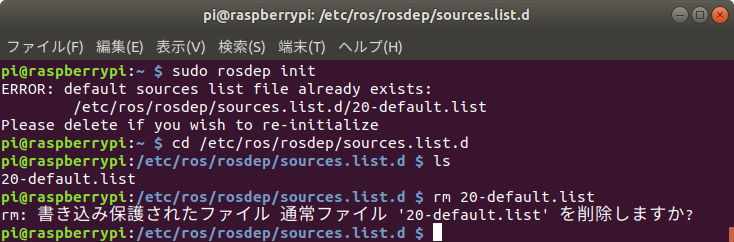
上記のままでは削除できないので、$sudo rm 20-default.list とします。確認後削除されていました。
ビルドするROSのソースコードを取得します。
desktop版の場合で実行
$cd ~/catkin_ws/
$rosinstall_generator desktop --rosdistro melodic --deps --tar > melodic-desktop.rosinstall
$wstool init -j2 src_isolated melodic-desktop.rosinstall
配置したソースコードに記述されている情報を参照して、依存するプログラムをインストールします。
$cd ~/ros_catkin_ws/
$rosdep install --from-paths src_isolated --ignore-src --rosdistro melodic -y
本日は、ここまで