ROS2をインストールをするのに Ubuntu20.04 では、ノートPCでも RasPi でも成功しなかったので、未対応としてバージョンダウンします。
ubuntu-18.04.4-preinstalled-desktop-arm64+raspi4.img.xz
上記の「Ubuntu-18.04.4 desktop」で、トライしてみます。
SDカードをフォーマット、上記イメージをダウンロード、SDにイメージ書込みをして RasPi の挿入します。
desktop 版でもPWの変更を聞いてきますので、変更したPWを2回打ち込みます。
成功しましたので詳細設定を行います。
1.日本語化 日本語(Mozc)OK
2.WiFi設定 OK
3.時刻設定 OK
4.Chromインストール 通常インストールはNG Ubuntuソフトウエアより入手 OK 同期 OK
5.スクリーンショット・アプリ・インストール Ubuntuソフトウエアより入手(Screenshot) OK
6.IPアドレスの固定 OK
7.キーボード配列がおかしい 日本語PC98設定でOK 半角/全角キーで変化なし 手動切替のみ 結果NG
まだ配列がおかしい。(端末でコマンドが打てない)
設定の入力ソースに、日本語(mozc)と日本語を選択すれば、日本語と英語、キーボード配列も正常 OK
リブートで反映される。
【ROS2インストール】
参考URL:https://qiita.com/k-koh/items/838c70004119c329c617
<PPAの追加>
$ sudo apt update && sudo apt install curl gnupg2 lsb-release
$ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc
| sudo apt-key add -
$ sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu
`lsb_release -cs` main" >
/etc/apt/sources.list.d/ros2-latest.list'
$ sudo apt update
<ROSのインストール(Dashing)>
$ sudo apt install ros-dashing-desktop
<colcon build インストール>
$ sudo apt install python3-colcon-common-extensions
<ROS 2 command自動補完のインストール>
$ sudo apt install python3-argcomplete
<環境変数を追加>
$ echo "source /opt/ros/dashing/setup.bash" >> ~/.bashrc
<ワークスペースの作成>
$ source ~/.bashrc
$ mkdir -p ~/ros2_ws/src
$ cd ~/ros2_ws
$ colcon build
$ echo "source install/local_setup.bash && source install/setup.bash"
>> ~/.bashrc
<動作テスト>
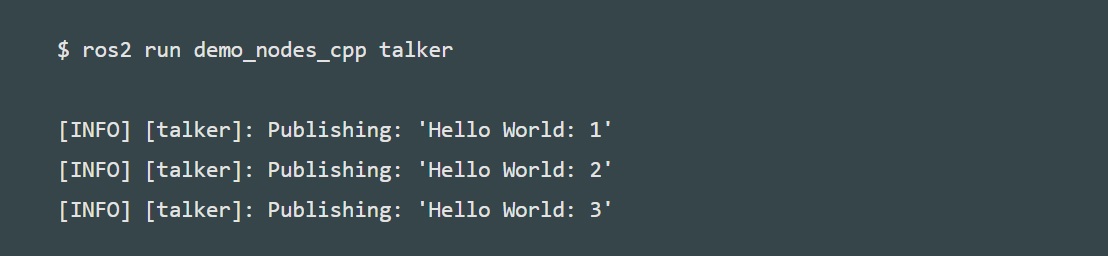
$ros2 run demo_nodes_cpp talker
別端末より
$ros2 run demo_nodes_cpp listener
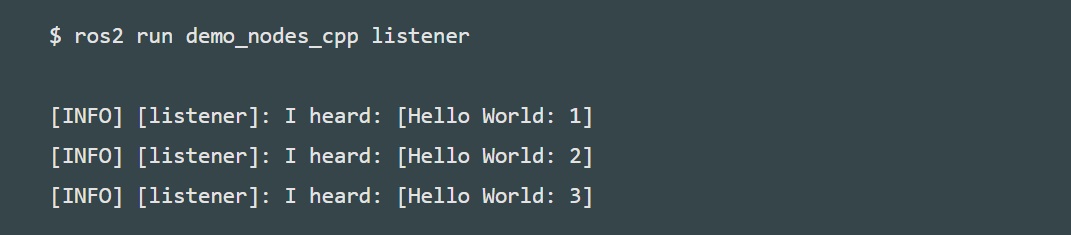
一応動作しています。
ここからは、下記URLを参考に進めるので、不足分のパッケージをインストールしておきます。
https://qiita.com/nasu_onigiri/items/39a0b16107e8e7fbbbe1
$sudo apt install Python3-colcon-common-extensions python3-pip python3-rosdep python3-vcstool
$source /opt/ros/dashing/setup.bash
$echo "source /opt/ros/dashing/setup.bash" >> ~/.bashrc
【 I2Cの有効化 】
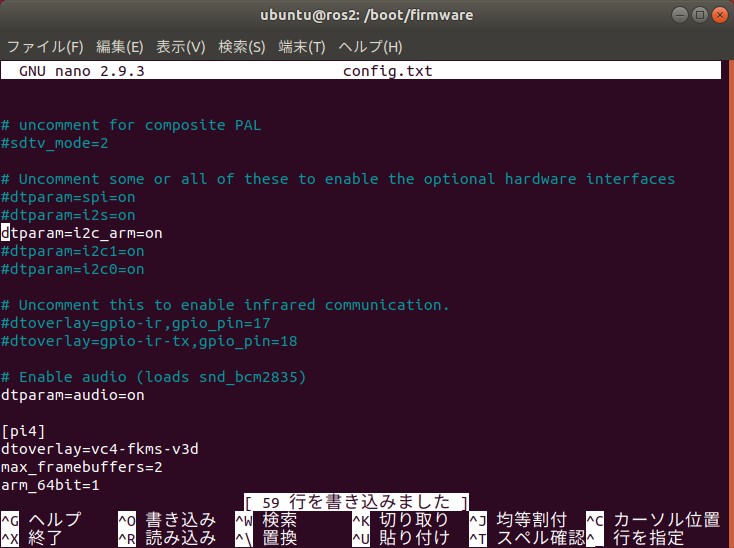
/boot/firmware/config.txt の修正
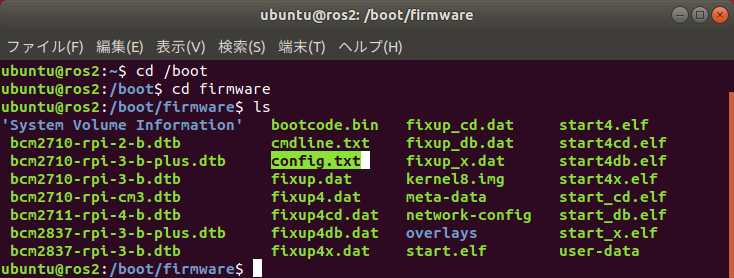
下記の部分の「#」を外す。
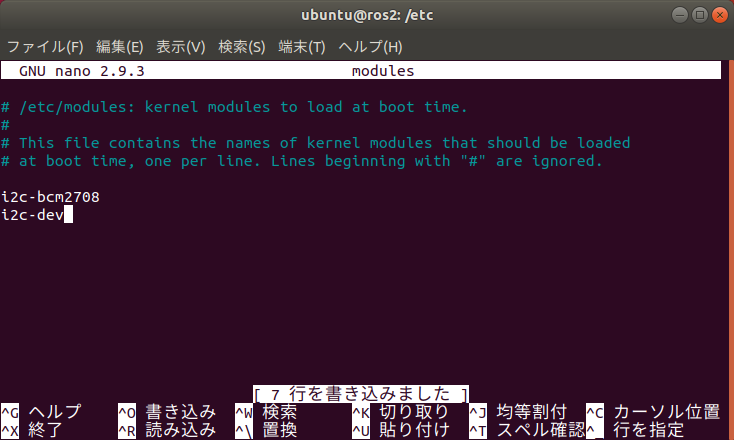
続いて、/etc/modules の最後に次の2行を追加します。
I2Cに必要なものをインストールしておきます。

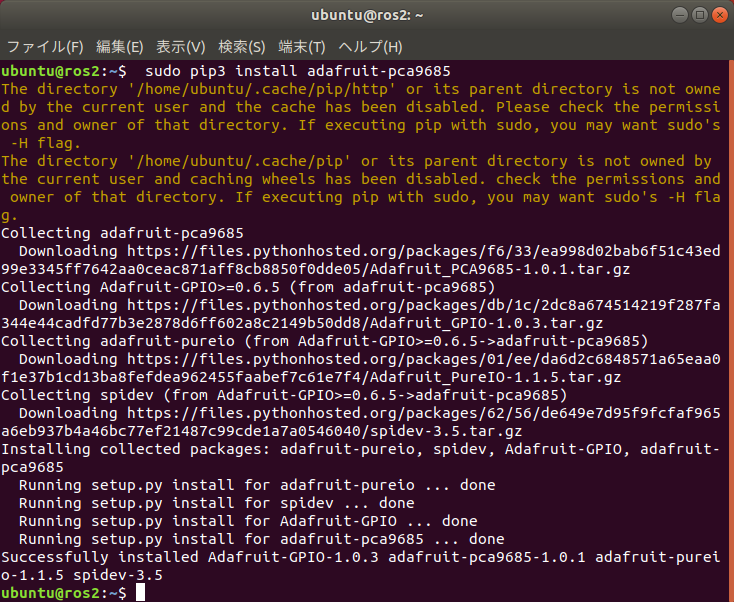
【 Python3 から PCA9685 のライブラリをインストール 】
$ sudo pip3 install adafruit-pca9685
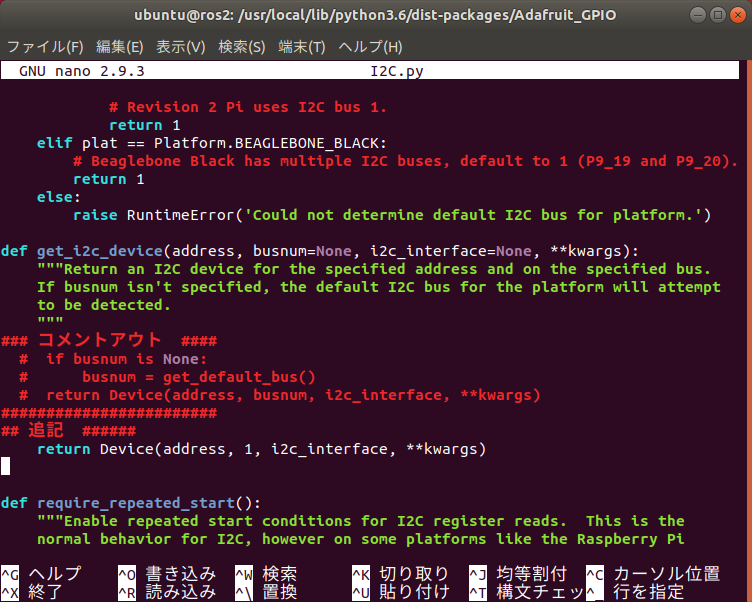
残念ながら、このままではエラーが出て使いないので以下の Python を一部修正します。
/usr/local/lib/python3.6/dist-packages/Adafruit_GPIO/I2C.py
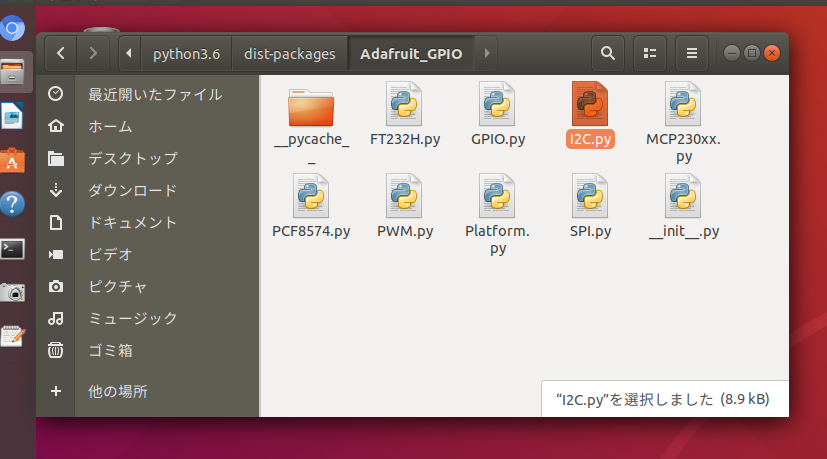
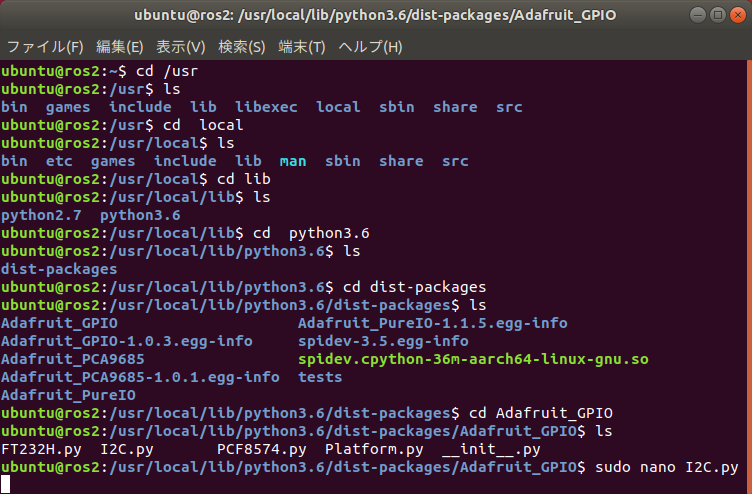
下記の通り修正します。
I2Cプログラムを動かすとき、毎回sudoしなくてもいいように以下を実行。(ubuntuはユーザ名)
$sudo usermod -aG i2c ubuntu
【 GPIOの利用準備 】
pigpio をインストール
## 念のため
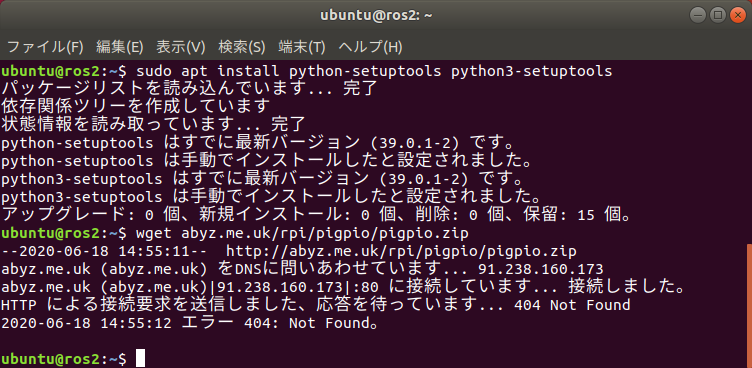
$ sudo apt install python-setuptools python3-setuptools
$ wget abyz.me.uk/rpi/pigpio/pigpio.zip
$ unzip pigpio.zip
$ cd PIGPIO
$ make
$ sudo make install
pigpio.zip ファイルが見つからない。
一般的なラズパイコンフィグで設定します。
$ sudo raspi-config
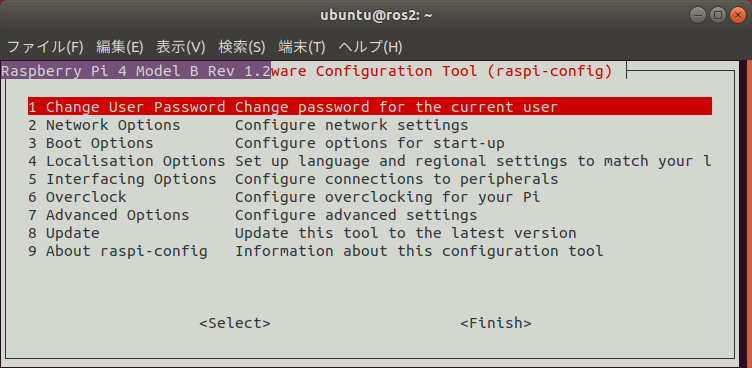
5 Interfacing Options を選択
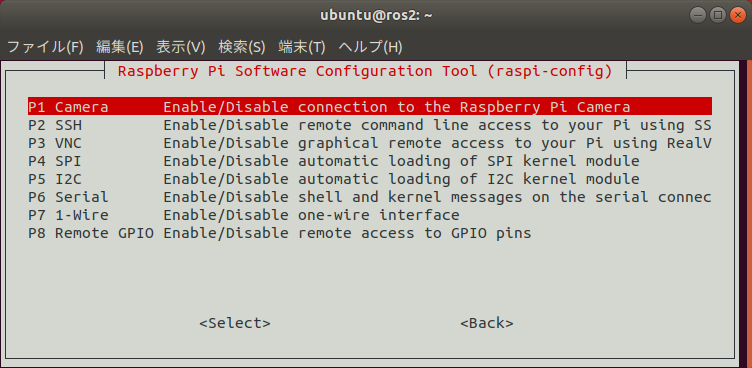
上記の「Camera」「SSH」「SPI」「I2C」「Serial」「1-Wire」「Remote GPIO」すべて使用可とする。
すべてのインストールと設定が終了したので、いよいよ電子部品をつなぎ動作させていきます。
次ページへジャンプ