ただし手元にないリモコン操作はパスしています。
まずは、トピックモニターから始めます。
リモートPC側:$ roscore
TURTLEBOT3側:$ roslaunch turtlebot3_bringup turtlebot3_robot.launch これを実行するとライダーが回転、停止します。
上記コマンドは、実際は「ssh jun@192.168.1.100」でTURTLEBOT3に入り込みコマンドを実行します。
したがって操作はすべてリモートPCにて行います。
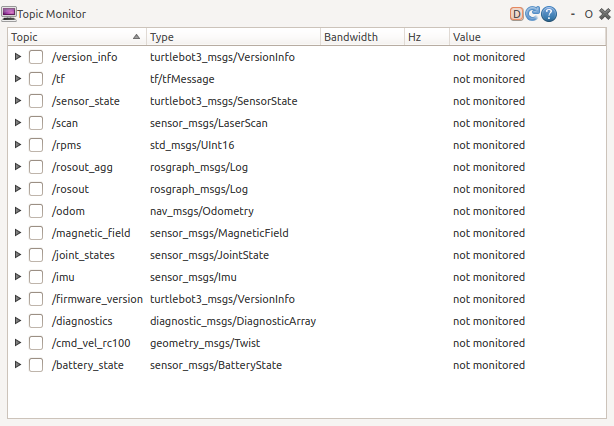
最初の rqt 実行時は何も内容表示はされませんので、( plugin-> Topics->を選択します Topic Monitor
)で基本項目が表示されます。
基本事項のみ開いた画面です。詳細を見るのはチェックボックスにチェックを入れて三角矢印をした向けにすると詳細表示されます。
/battery_state 現在のバッテリー電圧や残容量など、バッテリーの状態に関するメッセージを示します。

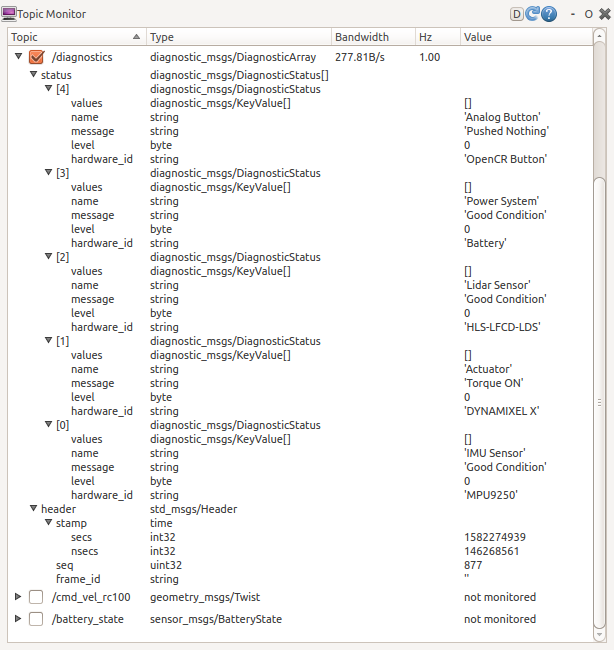
/diagnostics MPU9250、DYNAMIXEL-X、HLS-LFCD-LDS、バッテリー、OpenCRなど、TurtleBot3に接続されているコンポーネントの
ステータスを示すメッセージを示します。
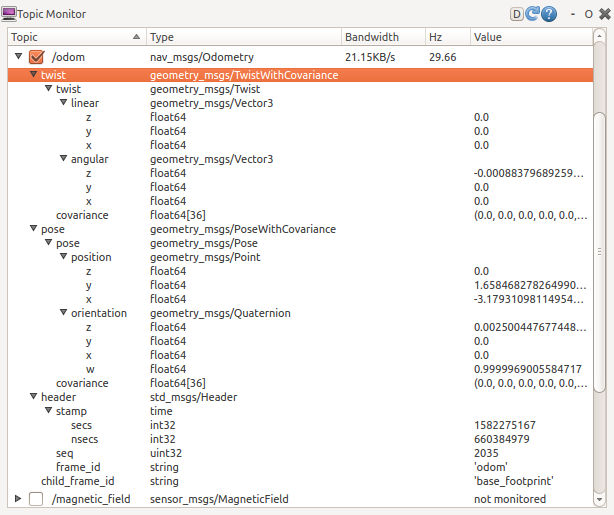
/odomTurtleBot3の走行距離を示すメッセージを示します。このトピックには、エンコーダデータによる方向と位置があります
今回は、走行させていないので、ほとんどが「0」です。
/sensor_state エンコーダー値、バッテリー、トルクのメッセージを示します。

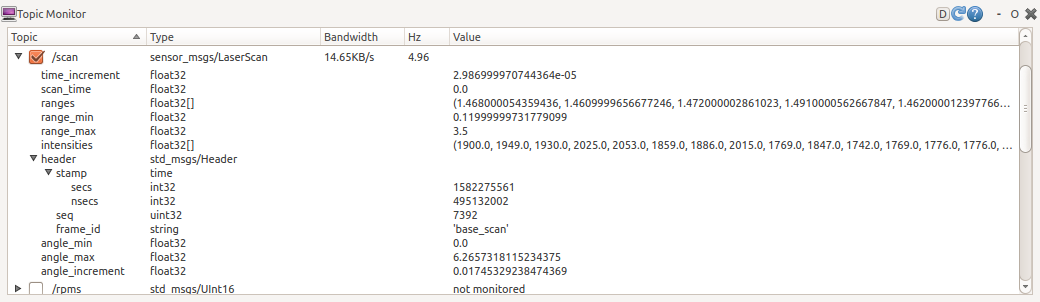
/scan angle_maxとmin、range_maxとminなどのLDSデータすべての範囲を示すメッセージを示します。
さらに、トピックを追加するたびに、rqtを使用してトピックを監視できます。