セットアップ方法には2種類の方法が有りますが、ここではリモートPCからのSSHを使った方法で説明します。
リモートPCからSSHで、TURTLEBOT3に入り込みます。<後日TURTLEBOT3アドレスは、192.168.1.100 に変更>
ホスト(リモートPC)アドレスは、後日 192.168.1.200 に変更しています。
成功すると、ユーザー名が「jun@Turtlebot3」に変わります。
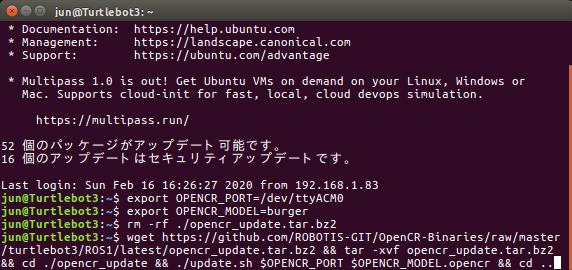
入った後は、以下のコマンドを入力します。
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=burger
$ rm -rf ./opencr_update.tar.bz2
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2
&& tar -xvf
opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh
$OPENCR_PORT $OPENCR_MODEL.opencr && cd ..

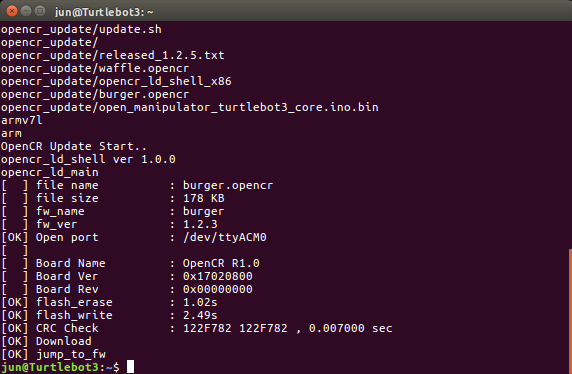
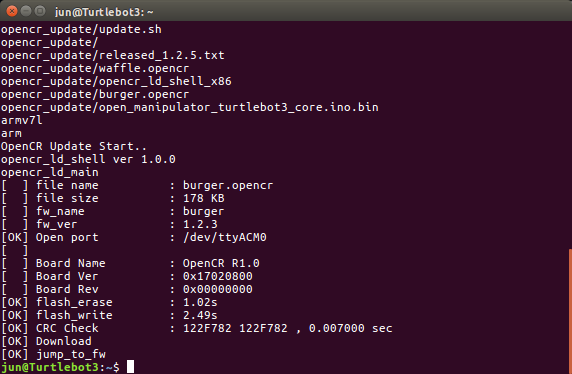
多くのメッセージが出た後に、「jump_to_fw」が出れば成功です。
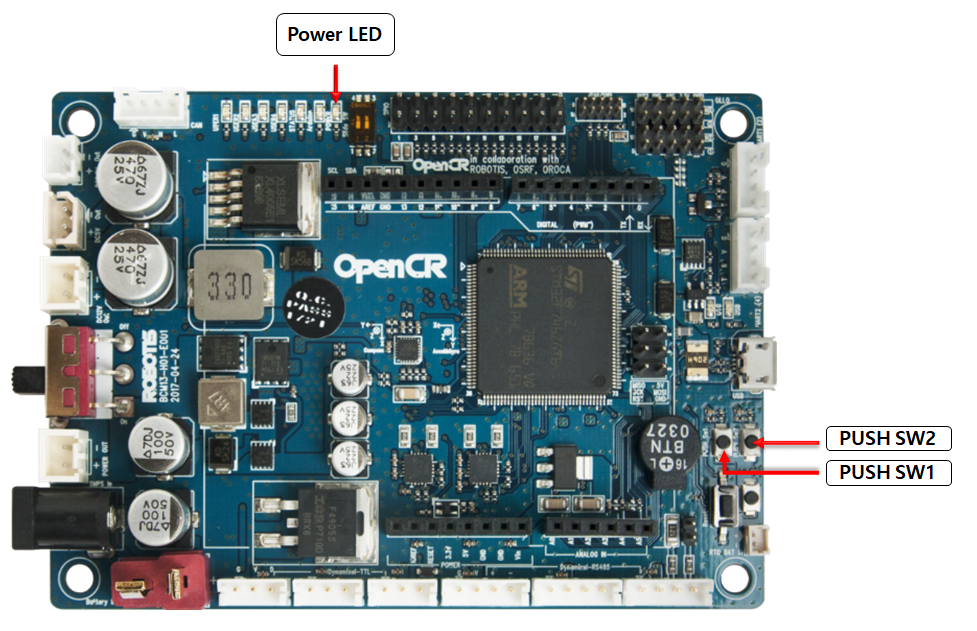
<OpenCRの基本操作>
SW1を数秒間押し続けると、ロボットは 30 cm 前進します。
SW2 を数秒間押し続けると、ロボットは 180 度 回転します。