【7:Bringup 】
PC:$ roscore
PC:$ssh pi@192.168.1.110
PW:ja3dxa8823
R2:$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
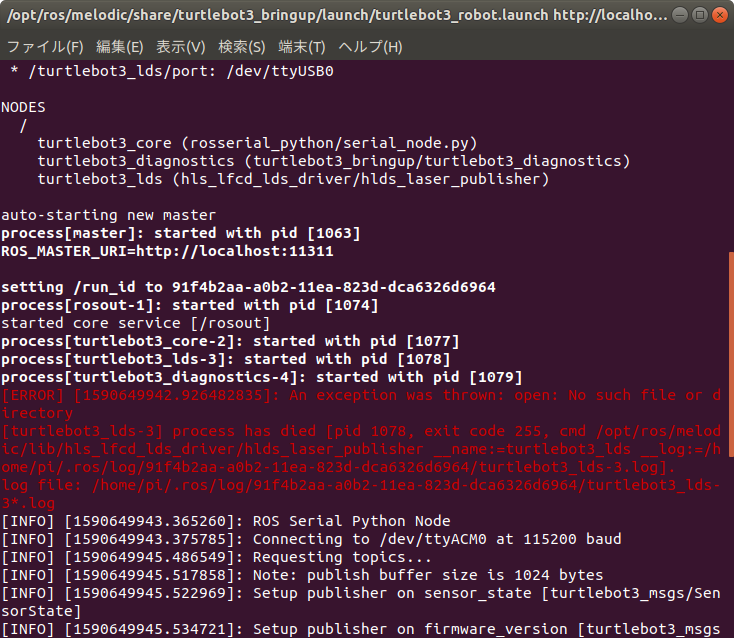
Error:LDSドライバーが無いというエラー( Lidar を2号機に取り付けていない為)
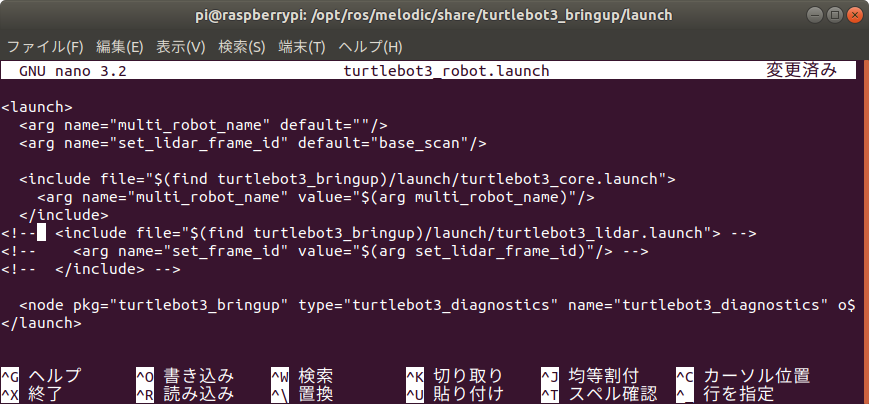
launch 内の Lidar 部分をコメントアウトします。
R2: /opt/ros/melodic/share/turtlebot3_bringup/launch/
R2:$sudo nano turtlebot3_robot.launch LSD部を<!-- -->で囲みコメントアウトする。
PC:$ export TURTLEBOT3_MODEL=burger ~/.bashrc 内で宣言済み
PC:$ roslaunch turtlebot3_bringup turtlebot3_remote.launch
ここまでOK。RVizがエラー無く立ち上がり Turtlebot3 が表示されている。
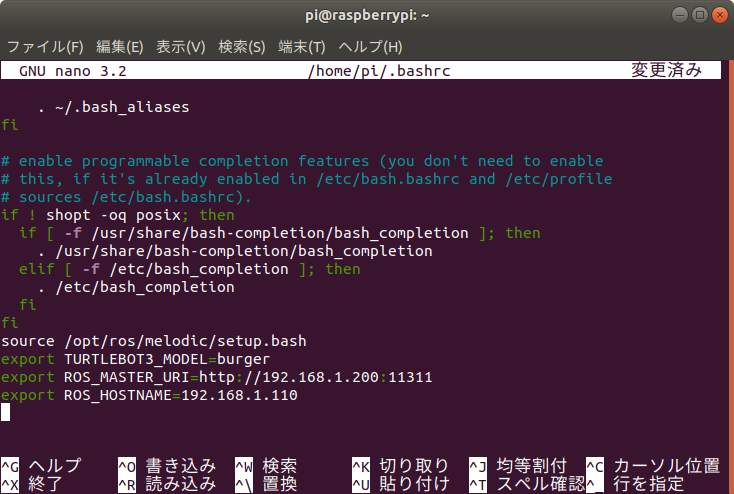
ここで、後々関係してくるマスターとホストの関係を「~/.bashrc」に記述しておきます。(白SD)
R2:$sudo nano ~/.bashrc
R2:$source ~/.bashrc
【 8.1:Topic Monitor 】
PC:$roscore
R2:$roslaunch turtlebot3_bringup turtlebot3_robot.launch
PC:$rqt
Topic Monitor が表示されチェックボックスにチェックを入れた項目は、ロボットの情報がモニタリング出来ました。
【 8.2:Teleoperation 】
PC:$roscore
R2:$roslaunch turtlebot3_bringup turtlebot3_robot.launch
PC:$export TURTLEBOT3_MODEL=burger ~/.bashrc で宣言済み
PC:$roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
リモートPCのキー(w, s, x, a, d)で、ロボット2号機は前後、左右回転動作をしました。
【 8.3.1:Move using Interactive Markers 】
PC:$roscore
R2:$roslaunch turtlebot3_bringup turtlebot3_robot.launch
PC:$export TURTLEBOT3_MODEL=burger ~/.bashrc で宣言済み
PC:$roslaunch turtlebot3_bringup turtlebot3_remote.launch
PC:$roslaunch turtlebot3_example interactive_markers.launch
PC:$rosrun rviz rviz -d `rospack find turtlebot3_example`/rviz/turtlebot3_interactive.rviz
Rviz 上での前後矢印、回転サークルをマウスで操作することで、ロボット2号機は指示通りの動きをする。
【 8.3.2:Obstacle Detection 】
Turtlebot3 での 障害物回避には、Lidar を使用しますので、2号機ではパスします。(未搭載)
【 8.3.3:Point Operation 】