RaspberryPi4でROS2を使ってみる(8)で、いきなり電子部品駆動をROS2を使いプログラムを作っていきましたが基本部分で捕まってしまい
まずはROSを使わないRaspberryPi4で直接電子部品を駆動させる取組で基礎知識を得てからROS化したいと思います。
【Raspbianのダウンロード】
https://www.raspberrypi.org/ よりNOOBSの「Download.ZIP」を選択
NOOBS_v3_4_0 を 解凍し内部ファイルをすべてSDカードに書込み(イメージでは無い)
Raspbian(32Bit)Fullを選択。(SDカードにより書込みエラーが出る:特にメーカー注意)
各種設定(すべて完了)

【 日本語入力 & スクリーンショット 】
GUI画面上の表示文字はすべて日本語表記になっていますが、キーボードからの入力は英文字のみなのでWeb検索等で日本語が使えないと不便なので
日本語入力が出来るように下記方法で「 mozc 」をインストールします。
$sudo apt-get update
$sudo apt-get upgrade -y 処理中に表示されるプロンプトにすべて yes とする為のオプション
$sudo apt-get install fcitx-mozc -y
再起動後、日本語入力が可能となります。
操作画面のスクリーンショットを撮影するために下記のパッケージをインストールします。
$sudo apt-get update
$sudo apt-get upgrade -y
$sudo apt-get install gnome-screenshot
インストール終了後に「アクサセリ」内にスクリーンショットが追加されている。
【 プログラムの開発環境設定 】
開発環境は以下の通りです。
1.テキストエディタ : Geany
2.Cコンパイラ : GCC
3.GPIO制御関数ライブラリ : WiringPi
作業フォルダの作成:ホームデレクトリ「 /home/pi 」に「 MyApp 」として作成。
< Geany の基本設定:コンパイラ設定 >
「ビルド」「ビルドコマンドを設定」よりコンパイル、ビルド、実行時のGCCコマンドの設定を行います。
Geanyは多言語に対応していますので、エディタ内にC言語でプログラムを書いておくと「C言語」としてのデフォルトコマンドが表示されるので、
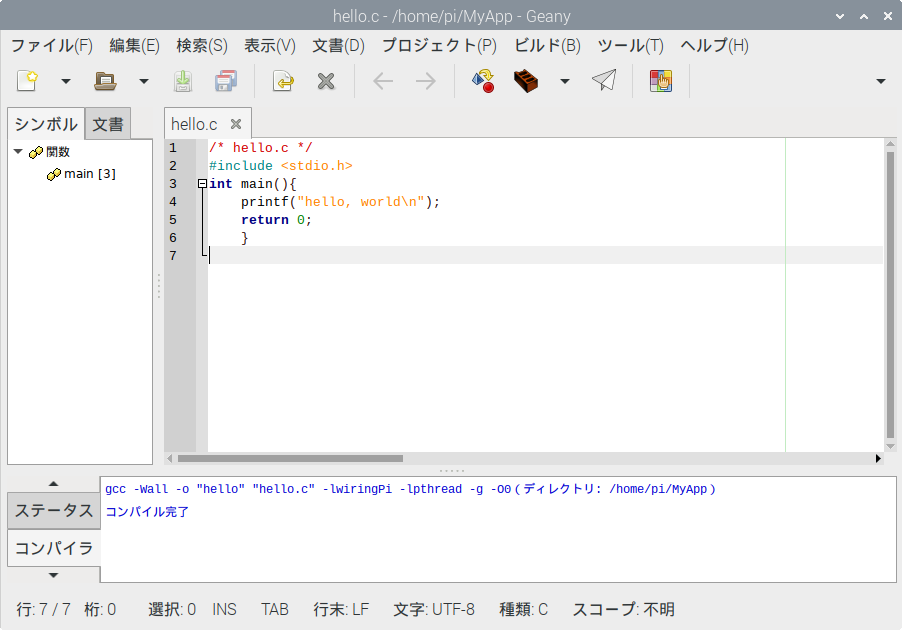
一部コマンドを追加する程度で終了します。(下記に簡単なプログラムを作成)
当初は、以下の画像の様にコマンドの色別けもないが保存すると「C言語」で決定される。
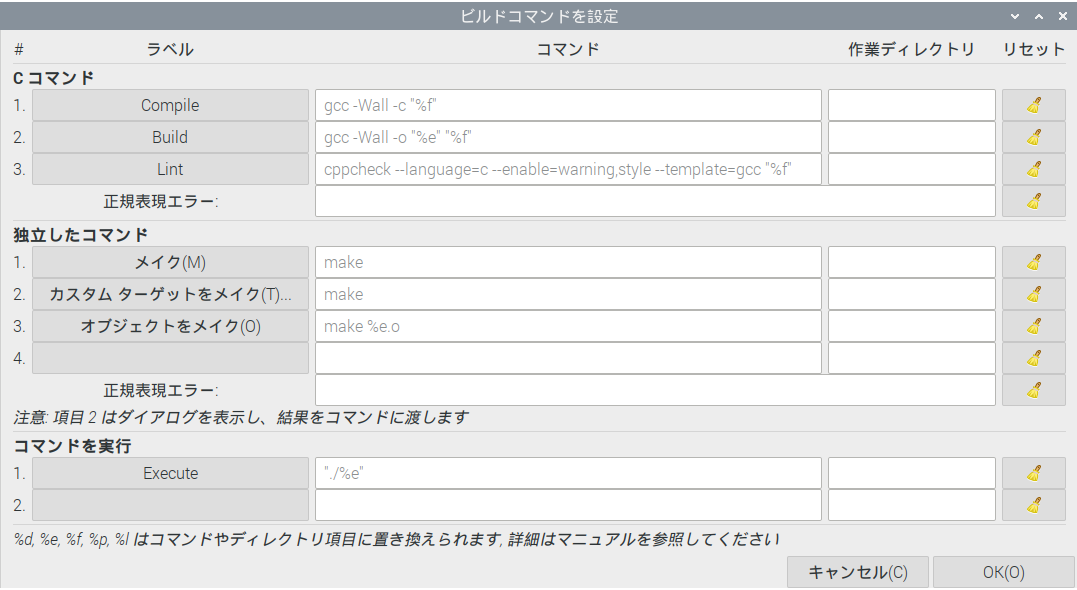
最初は空欄であったが、上記「C言語」を入力し保存すると下記のデフォルト設定が表示される。
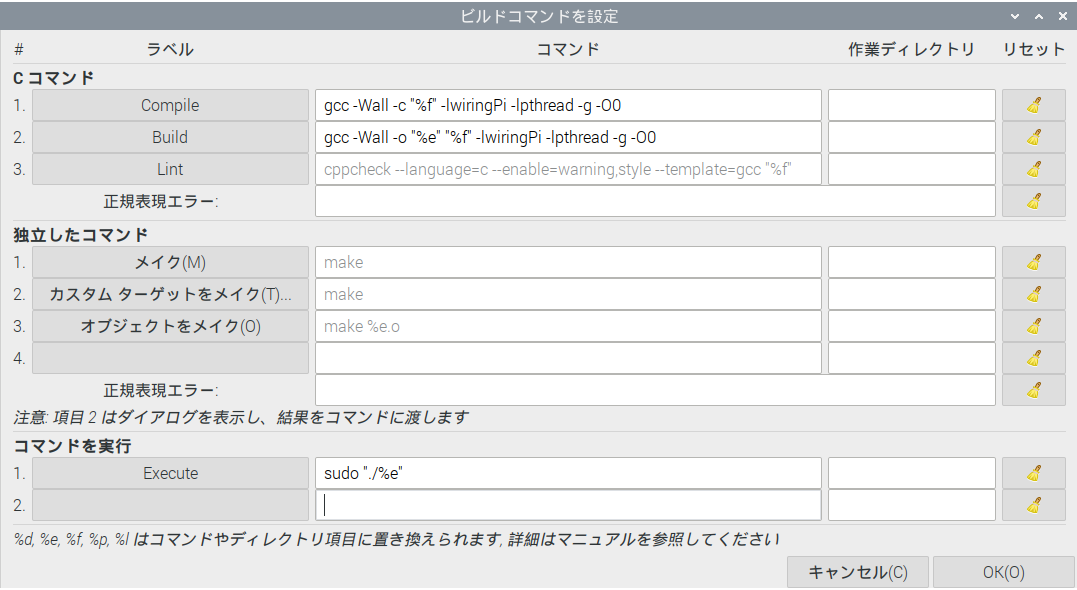
「Compile」「Build」「Execute」欄に下記の様に追加します。