以降の操作開始にあたって、下記の事が完了していることが前提となっています。<操作はすべてリモートPCで、SSH通信でTURTLEBOT3接続>
リモートPC側:$ roscore
TURTLEBOT3側:$ roslaunch turtlebot3_bringup turtlebot3_robot.launch これを実行するとライダーが回転、停止します。
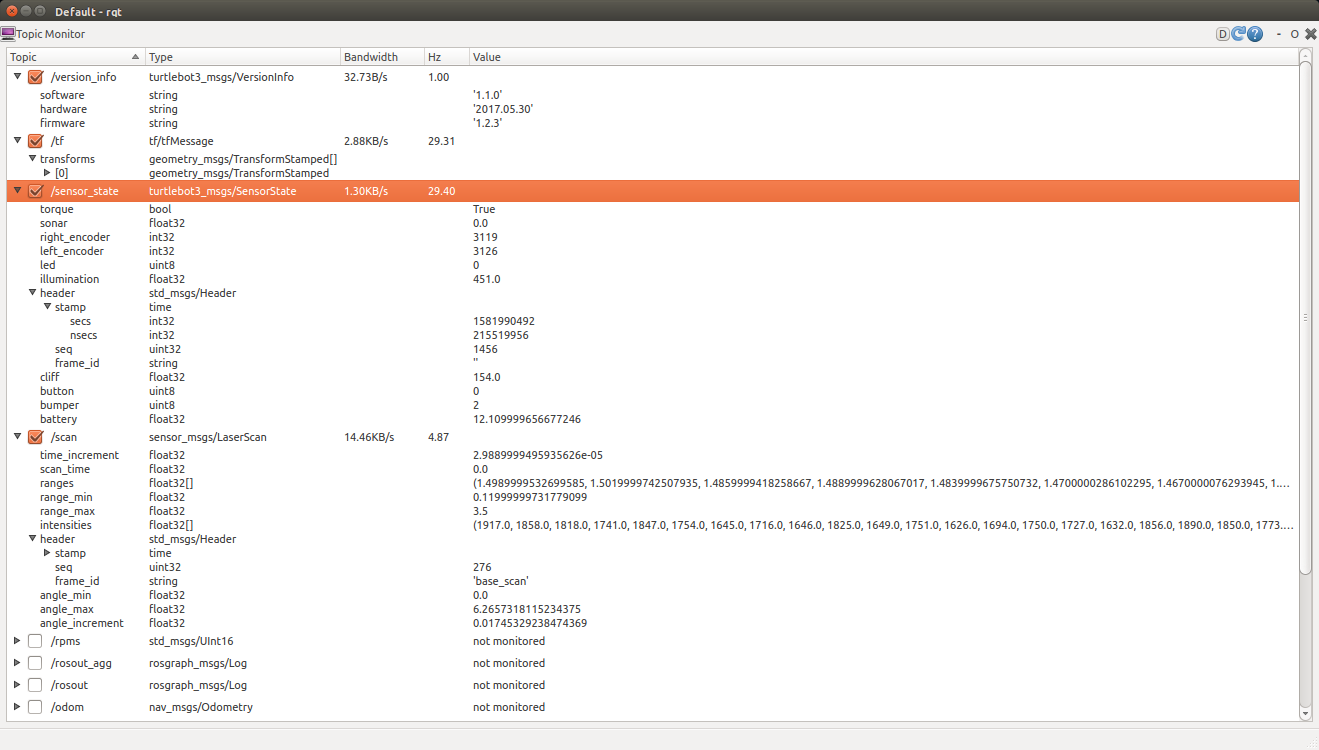
【トピックモニター】
TurtleBot3のトピックを確認するために、ROSが提供するrqtを使用します。rqtは、ROSのGUI開発用のQtベースのフレームワークです。
rqtは、トピックリストのすべてのトピックを表示することにより、ユーザーがトピックのステータスを簡単に確認できるツールです。
GUIにはトピック名、タイプ、帯域幅、Hz、値があります。
最初は、下記の様な詳細情報が表示されない場合あります。その時は:plugin-> Topics->を選択しますTopic Monitorで表示されます。
【テレオペレーション】
この操作は、手元にリモコンが無いので動画紹介のみです。
【その他の基本操作紹介】
まずは動画での紹介
ビデオ動画の検証
【Move using Interactive Marker】
リモートPC:$ roscore
TURTLEBOT3側:$ roslaunch turtlebot3_bringup turtlebot3_robot.launch これを実行するとライダーが回転、停止します。
TURTLEBOT3側操作は、リモートPCよりSSH通信で実行します。< SSH jun@192.168.1.100 >
リモートPC:$ roslaunch turtlebot3_bringup turtlebot3_remote.launch <TURTLEBOT3_MODEL=burger
は、~/.bashrc で設定済み>
リモートPC:$ roslaunch turtlebot3_example interactive_markers.launch
リモートPC:$ rosrun rviz rviz -d 'rospack find turtlebot3_example' /rviz/turtlebot3_interactive.rviz
下図の様なエラーが出ている(そのせいかTURTLEBOT3の画像が出ない)
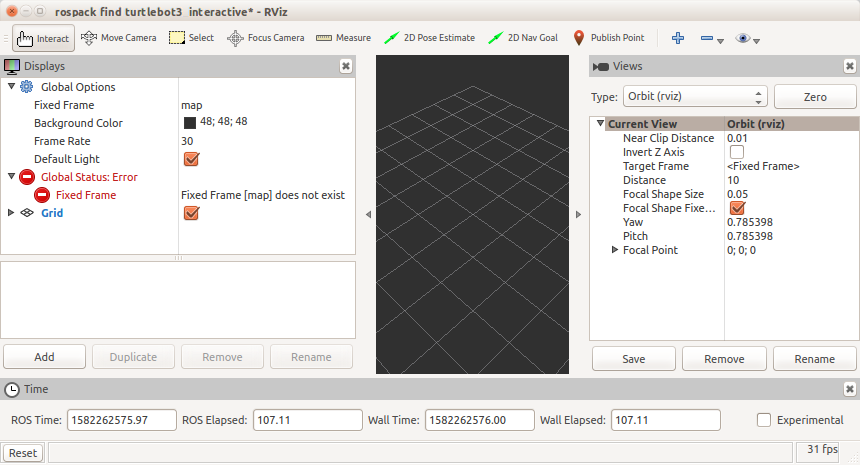
一応下記のコマンドを打てば、エラーは表示されなくなるが、相変わらずTURTLEBOT3の画像が表示されない。

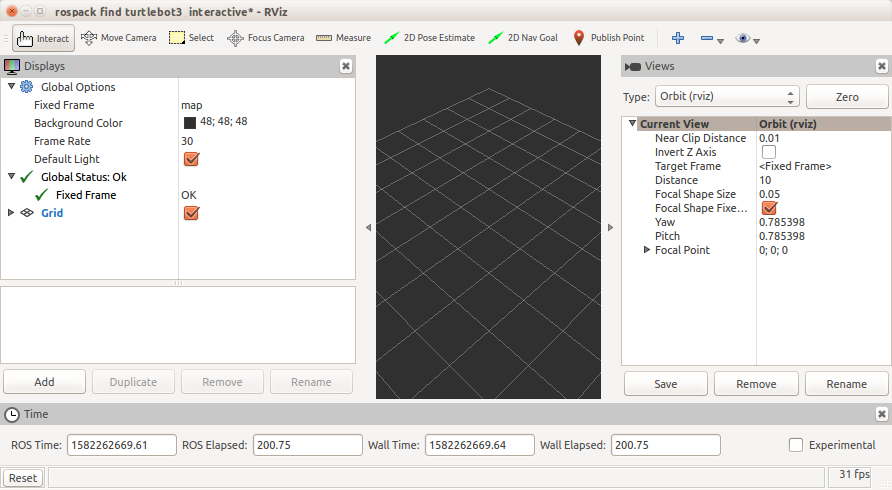
予めMapデータ等のデータを作成しておく必要があるのかもしれないので、マニュアルの順番を再度追っていきたい。